On one of my VTOL aircraft, I have dual Here2 GPS units connected through UAVcan and a pixhawk 2.1 as the FC. Running 3.9.8 version of arduplane. I’ve been flying this bird off and on for a few months, and had a strange situation in flight yesterday.
I had just completed a grid mission, fully in Auto. After reaching a certain waypoint close to landing, #114, I suddenly saw numerous errors on the MissionPlanner HUD as well as a massive drop in estimated altitude.
Errors I saw:
-Error velocity variance. Appeared only once, immediately before the alt drop.
-Error Compass Variance and Bad Compass Health, which alternated on the HUD until I disarmed the aircraft.
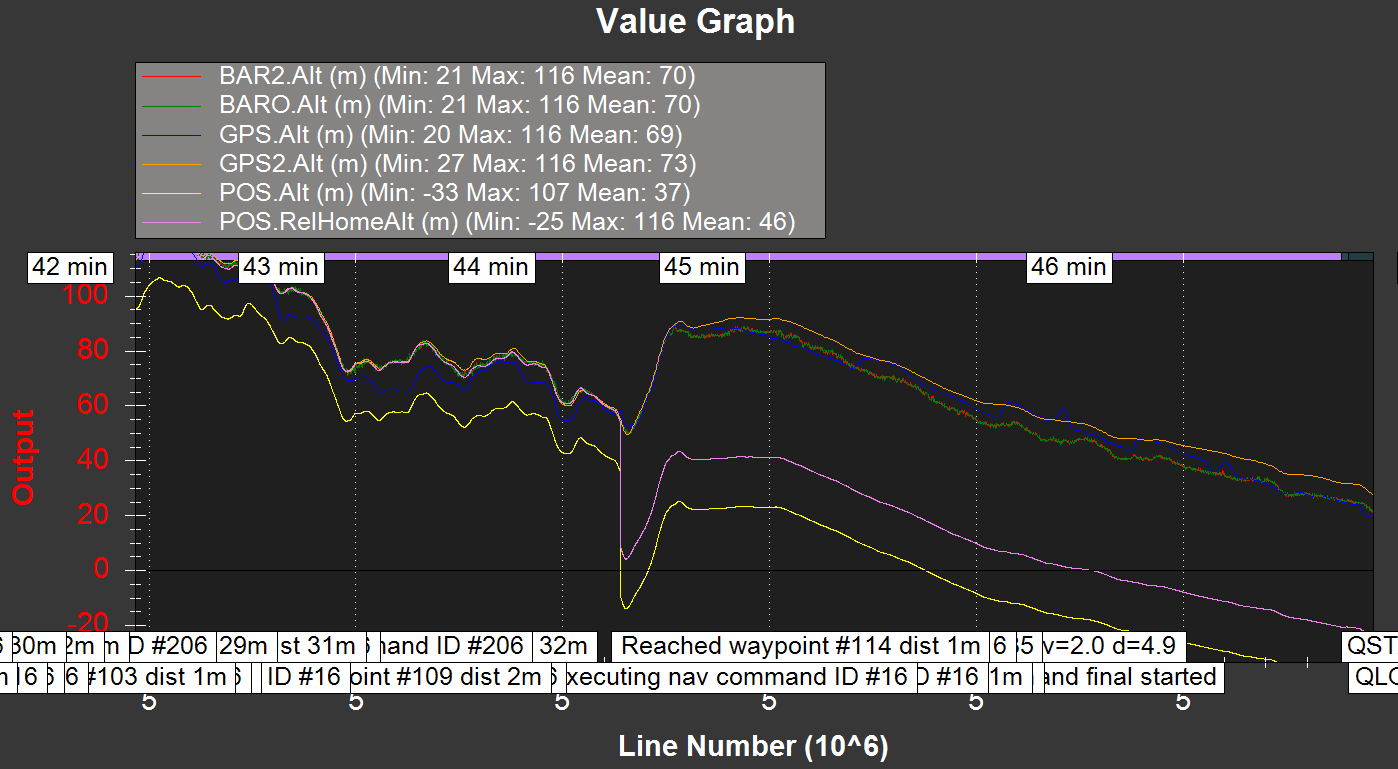
-The altitude displayed on the HUD dropped from 178ft to 23ft instantaneously. The aircraft itself did not descend, only the alt estimate changed.
Following this, the aircraft started climbing to “regain” that supposedly lost altitude.
It passed through waypoint #115 while climbing, and then attempted to land as a VTOL at waypoint #116, which is a VTOL_Land point.
During it’s descent, it was very unstable as a quad, bouncing around as if the PIDs were poorly tuned when I know it to fly better than that. It quickly reached “0” altitude on the HUD, and slowed its descent because of that. At this point, I elected to take manual control and land it myself. The HUD showed an altitude of -150ft once on the ground.
Looking through the telemetry and dataflash logs, I cannot find any reason for these errors to suddenly propagate. Both GPS Alts along with both Baro Alts seem correct, but the Pos.Alt suddenly drops.
And I’m even more lost on the velocity error and compass errors. Not sure why it would suddenly go haywire like that. I’ve got 25+ flights on this plane, and have never seen it do anything like this.
DF Log is HERE
Any input/help/ideas would be greatly appreciated