Hello!
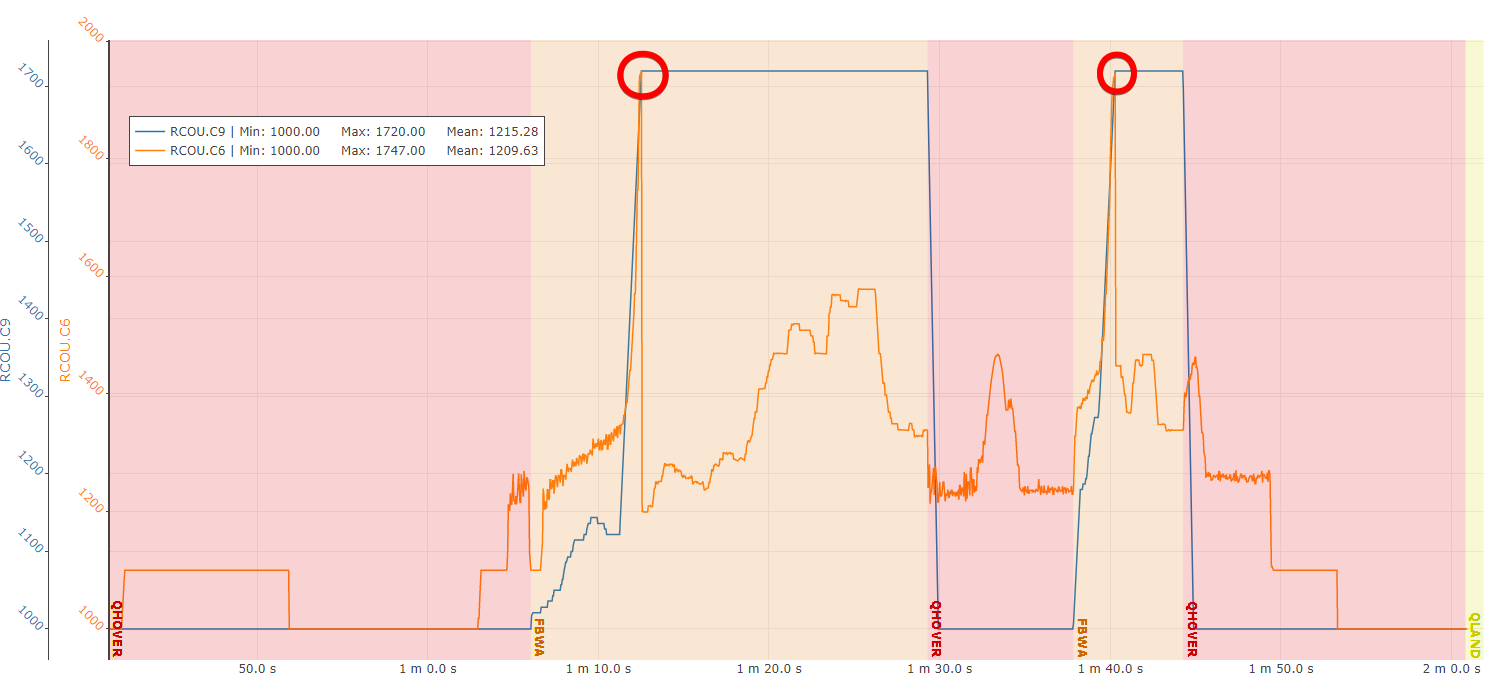
We were testing quadplane on the stand to see servo and motors behavior and we noticed that after transition there is a full throttle spikes. I’ve added screenshot from logs. RC9 - tilt-rotor servo. RC6 - motor.
Do you know what could it be and how to fix it?
also, log file is attached.
https://drive.google.com/file/d/1XJSVL4rEl7eJm1hYQqnmimFstyOVcV9G/view?usp=sharing
1 Like