Description: Hi Everyone. We’ve got a hybrid hexacopter with a Pixhawk 2 installed. It’s a 49V generator that powers the system in flight with essentially a backup battery system at that point. We can’t figure out how to get the generator fuel tank sensor integrated into the MAVLink stream and fuel tank level displayed on Mission Planner. I’ve seen a few posts in here about it so I think this would benefit a number of users, especially as hybrid electric systems become more popular.
The fuel sensor puts out a 5V, 50hz PWM signal from 1100-1900us. What we want is to plug this sensor into the Pixhawk and read its status. Then display this status on Mission Planner somewhere so that the pilot has real-time fuel status while flying.
I’m not capable of doing the work so I’m looking at developers in here to take this on if they’re interested and suggest additional costs. I’m putting the planned amount as $30 + developer time (unknown to me so hoping for some feedback).
Planned amount $$ (USD): $30 for sensor + $$ for developer time?
Estimated time for completion: A few days for someone capable? Feedback desired…
Did you really want to post this here or would the Jobs category be more appropriate? I’m asking because it seems like you are looking to hire someone to do this job for you rather than asking ArduPilot to pay for this.
I think that’s a fair question and the answer might be either. I’m fairly new to the forum. I did read the pinned post about this section and it says
We expect proposals to come from at least two sources: 1) People with a project in mind that they would like to receive funds in order to help it along, or 2) People who would like to propose a piece of work that will be completed by someone else
So I thought it might be appropriate to post here where some other developer would pick up the work but then have Ardupilot pay for it as it will benefit a number of users. Would it be better to post in Jobs first to find someone interested in doing the work and an estimate of cost for their time, then post back here to see if Ardupilot would be willing to cover some of the expense?
That second option you highlighted is certainly a possibility. It gets trickier to evaluate because we (the Funding Committee) can’t approve it without knowing the exact cost.
If your wish is to pursue that second option then having this thread in the Proposals is certainly appropriate.
I posted this in jobs and found an interested party that could implement the sensor. They estimate it’d cost them $300 to do the sensor implementation and $30 to buy a sensor to test with.
Does that help the Funding Committee evaluate if this is something Ardupilot would cover?
Hi Jakee,
I have recently added support for a different type of fuel flow sensor:
The difference is that the sensor I added gives a pulse per unit of volume. Yours gives a PWM signal proportional to volume/sec.
I think adding another backend to the battery monitoring system in a similar way but for PWM based sensors makes sense.
Cheers, Tridge
Hey Tridge, yeah saw that and the dev I talked to is aware of it too. How is it physically integrated? Into a PWR plug?
This particular hex, we’re going to have a PWR plug off a PDB where 12S Lipo and generator are feeding, and then a separate PWR plug directly off the generator bypassing the PDB for dual redundancy. Not sure how our tank sensor would quite integrate.
I should say that the ‘dev’ in question is Myself, if Ardupilot were footing the bill I would do a discount.
I’m still finding my feet in the ‘contracting’ game, but I have now done a few small bits of work for people in the Jobs section. Not sure if I’m cheap or expensive, I don’t think I’m doing very well on the hourly rate but it funds bits a pieces for my Ardupilot toy box. I would welcome advice and feedback from more experienced members of the Dev team (or anyone else).
Sure, we are the Northern Plains UAS Test Site and we conduct UAS research. We’re using a Pixhawk 2.1 based hybrid hexacopter to fly a networked area in North Dakota, actually a very unique project. We connect MP to a TCP network with C2 towers in it and control the aircraft via that network instead of point to point.
We have no Ardupilot expertise in the organization though so that’s why I’m here, to find some
I hope you are still finding the solution for the liquid level sensor integration . While searching for the similar issue to measure the liquid in the spray tank in my crop sprayer. I came across this. Hope this would help to solve your problem to some extent.
While I’m not an expert on the FCC, 433 MHz is not an appropriate band for transmitting sustained sensor data from a UAS. As I understand it, it’s meant for periodic transmission of data for internet of things types of devices.
Secondly, the Richenpower version of that display does not have an FCC ID. Does the Foxtech version have an FCC ID? So regardless of intent and operation within the “unlicensed” band of 433 MHz, it still requires an FCC ID and that is not something we intend to go get for that product.
Our work is well beyond hobby tinkering. We work with and under close scrutiny of the FAA and FCC so we have to play a bit more by the rules than some.
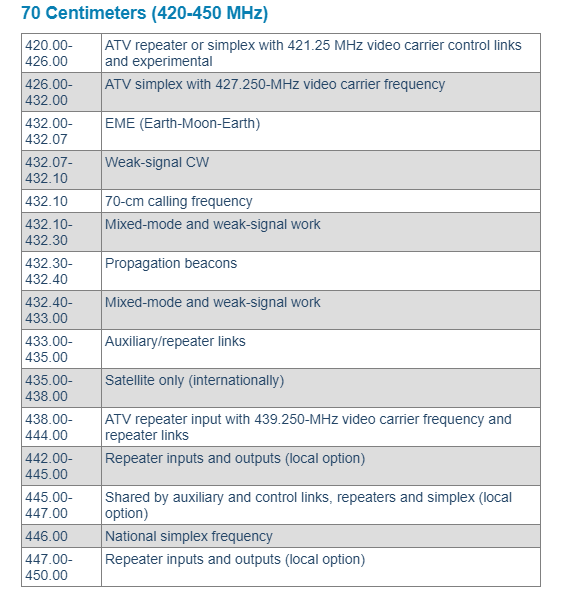
Stay off the EME. sat and repeater freqs and you can run telemetry or two-way RC control links on 70cm all you want with 1 watt ERP. It used to be band-shared with the USAF PAVE PAWS (Precision Acquisition Vehicle Entry Phased Array Warning System) but it no longer is.
It requires minimum Technician Class Radio Licence to transmit on the band.
I use 433 telemetry on the band all the time. Using standard ham gear I can get 30 statute miles range from a 30dbm link with no problem.
Ham radio operators are Federally Licensed and equipment is not required to have a FCC Part 15. We bounce signals off the moon to the other side of the earth on the band all the time, which you are not going to do with 47 CFR Part 15 equipment. There is no FCC Part 15 equipment that even exists for the band.
This really isn’t an appropriate place to be debating our use of 433 MHz or not UAS integration goes far beyond getting an ARRL license so let’s just agree to disagree that we won’t be using it for our purposes.
the license does not come from ARRL, which is nothing but a lobbying arm for radio frequency spectrum. It comes from the FCC. You had pointed out that
I am pointing out you are incorrect. It has nothing to do with spectrum restrictions, it has everything to do with being properly licensed to use something other than consumer or hobby-grade 47 CFR Part 15 equipment in the US.
We have similar radio equipment that requires the same licence certified for operating in TFR’s with manned aircraft under control of the temporary ATC facility established for the TFR. And had to meet NASA UAS Cert and supply the licenses and qualifications for every piece of equipment on the helicopter, including the pilot, to get it approved under the blanket FAA waiver. We have already done what you’re attempting to do. If you would like more information contact Mark Bathrick, Director of Aviation Services US Dept of Interior.
So just wanted to point out there is no problem at all using that equipment as long as you are qualified to use it in the US.

 UAS integration goes far beyond getting an ARRL license so let’s just agree to disagree that we won’t be using it for our purposes.
UAS integration goes far beyond getting an ARRL license so let’s just agree to disagree that we won’t be using it for our purposes.