I am trying to get a display of voltage on my FrSky X9D Plus transmitter. I understand that I must use a telemetry cable (following https://ardupilot.org/copter/docs/common-frsky-telemetry.html) and this will then allow the transmitter to detect the voltage/current and other things as provided by Ardupilot.
Only thing is, when I do “Discover new sensors” in the “Telemetry” screen on my transmitter, it only ever shows “RSSI” and “RxBT” as it always has done. It does not discover any new sensors.
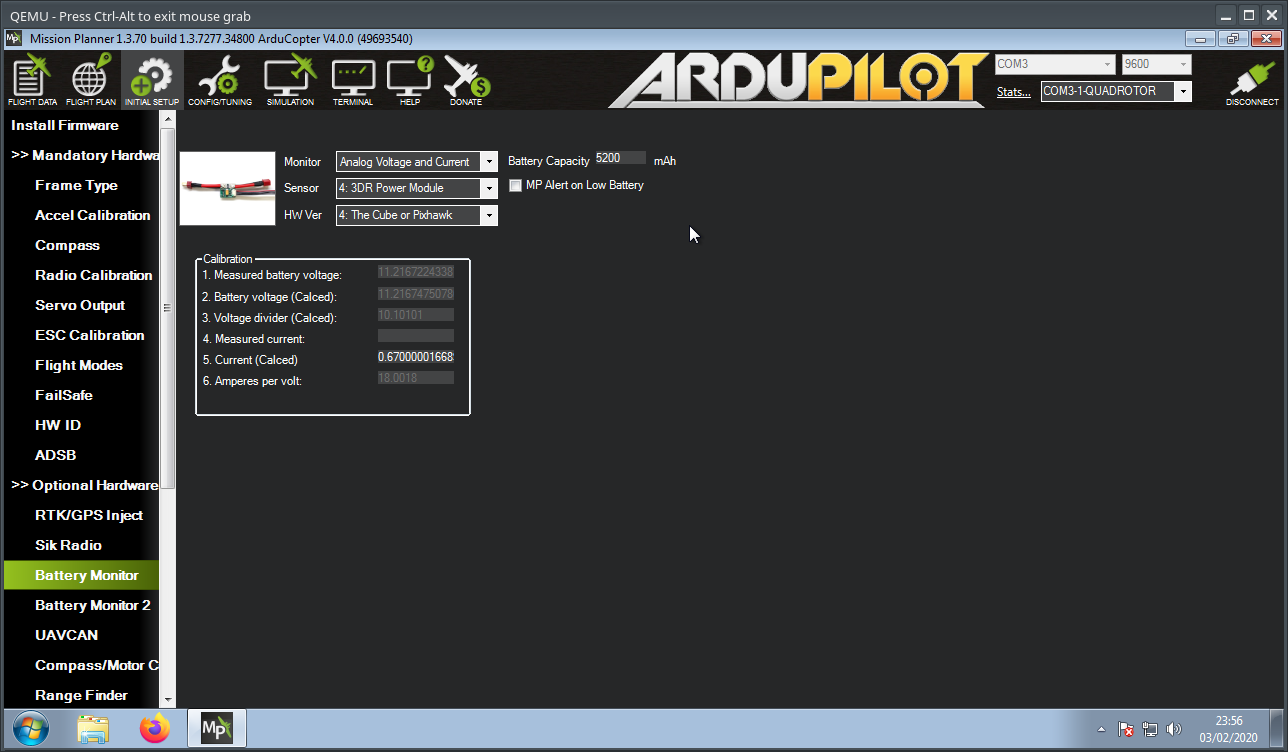
I have a cheapo V/I sensor that came with my Pixhawk 1 clone. I have set this to “3DR Power Module” and the voltage seems right. Not sure about current. This is a screenshot:
I have my telemetry passthrough cable attached in this diagram:
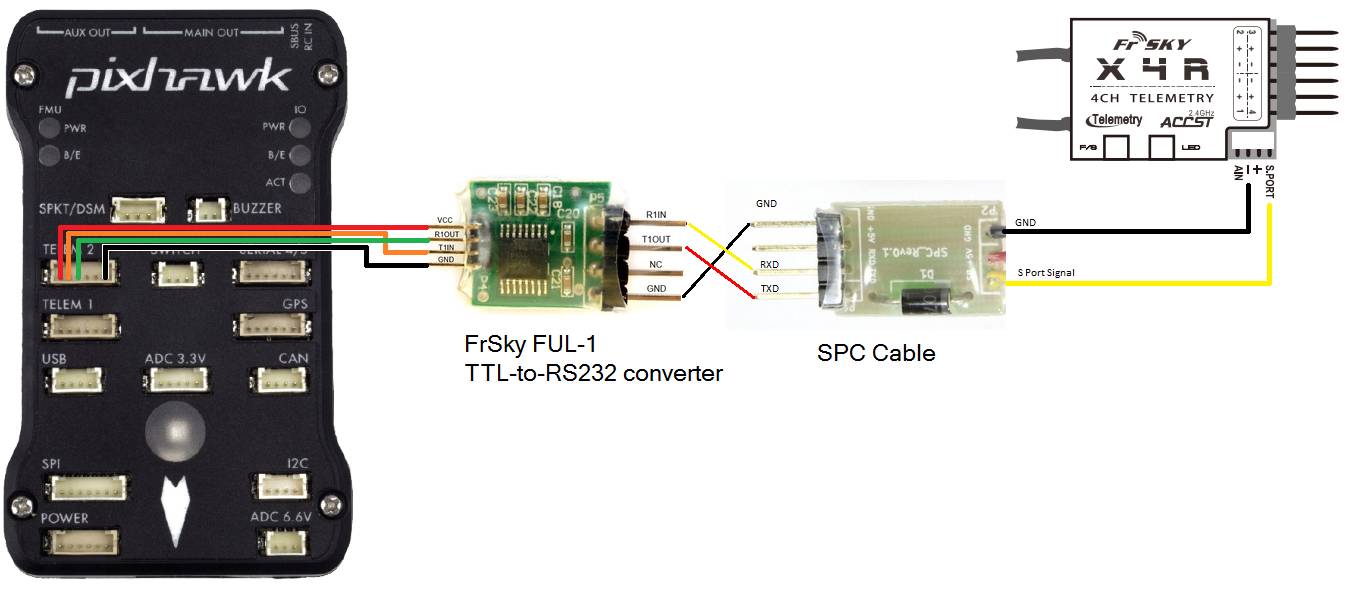
And it goes into the SMART port of my X8R receiver.
I also tried this setup:

But to no avail. Please can someone give me some ideas to debug this? Does FrSky passthrough happen automatically and if so which port? If not, how do I enable it? Do I need to start probing stuff with an oscilloscope?
Thanks.
Edit:
I set SERIAL2_PROTOCOL to 10 in Mission Planner. I now see GPS on my transmitter. But the question remains, how do I get battery voltage on my transmitter?

