Hi I experienced a EKF failsafe this morning which should have landed the copter EKF_Failsafe = Land.
It did go into land mode however it didn’t land, instead it rapidly took off to the North East climbing and left the GeoFence area.
I managed to land the copter by repeating the following:
Upon flyaway hit ‘brake’ mode
Wait a few seconds flick into ‘RTL’
Upon EKF failsafe kicking in the and copter flying away again i would kick into brake mode and repeat.
Question is why did it fly off upon entering land mode? It had enough control to hold position upon brake and could return to home. This was a little alarming to say the least.
Vibration Compensation FS was activated. You have vibes into the 80’s and just like the other log you posted outputs are maxed out. I would suggest going back to basics here as you do not have a stable craft. Unless your goal is to push it to failure then you are succeeding. It’s a worthy goal, I have craft to do exactly that.
I wasn’t aware the failsafe was due to vibrations. Thank you for that. How did you see this?
The FC is mounted in a similar configuration to previous builds with rubbers.
This needs more understanding before flying again even with changes.
Craft is stable in landing and normal flying when not maxed out thrust wise. There is a big difference between what happened (flying away and increasing height) and landing as it was supposed to. This is not something that should occur, vibrations or not.
If it can land with RTL why can’t it land with EKF Failsafe = Land?
In land mode all 4 motors are at 75% throttle. MOT_THRUST_HOVER is set at 0.209.
I need to understand this before trying to fly again.
Just to back up what Dave says, a 2nd set of eyes over the log →
Definitely Z axis vibrations are too high. The effect is the copter thinks it is falling, and so commands higher and higher output from motors - even during Land mode. This can be a bad situation, because the higher commanded output produces more vibrations, and so around we go…
Average vibrations should be below 15 (or ideally 10) and you shouldnt have any peaks that go over 30.
Once vibrations are fixed, the copter can be retuned, or at least re-assessed, as vibrations make a big difference to tuning.
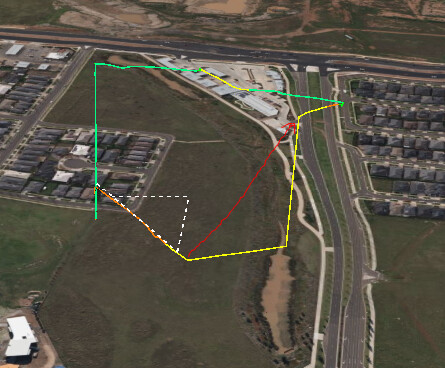
It explains the difference between what I witnessed and the logs. The copter followed the red trajectory I’ve drawn, but the logs show height stays relatively level (yellow line) until it realizes the error and corrects shown by the vertical jump.
I’m going to bench test to reduce vibrations. To get them into the area you advise.
The barometer and GPS both reported increase altitude. I guess EKF was looking at the accels to detect it was falling instead? With a vibration failsafe it might be worthwhile relying on these external sensors more for up/down and horizontal speeds? Anyway you no doubt don’t need my input, but sometimes you need a gumbie to test the system