Had a fly away today have no idea why lead to totalled aircraft here is the link to the log 00000014.BIN - Google Drive
Hi @Prest0n,
So some things…
- ARMING_CHECK = 0. This turns off all checks and some of those might have helped prevent this issue. In general it is best to leave the checks on and resolve the underlying issue. If you’re sure it’s not an issue then just disabling the single check box related to the failing check is safer.
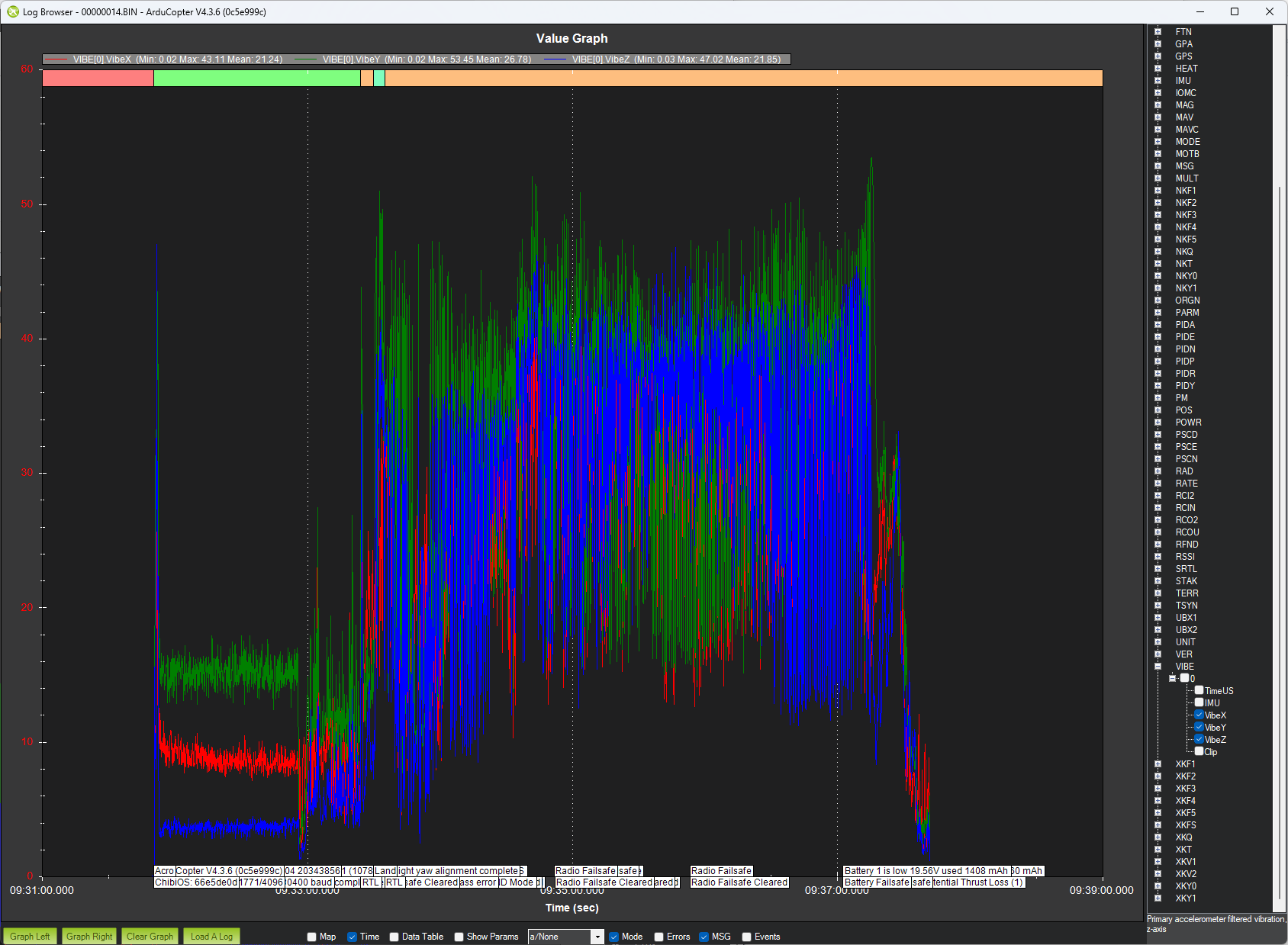
- High vibration levels especially in the x and y axis. This is leading to clipping where the accelerometers are saturating and this leads to the EKF being unable to correctly estimate it’s position and velocity
The climb at the beginning to 800m looks like it’s simply that the vehicle is in Acro mode with input throttle at about 50% which is enough to make the vehicle climb.
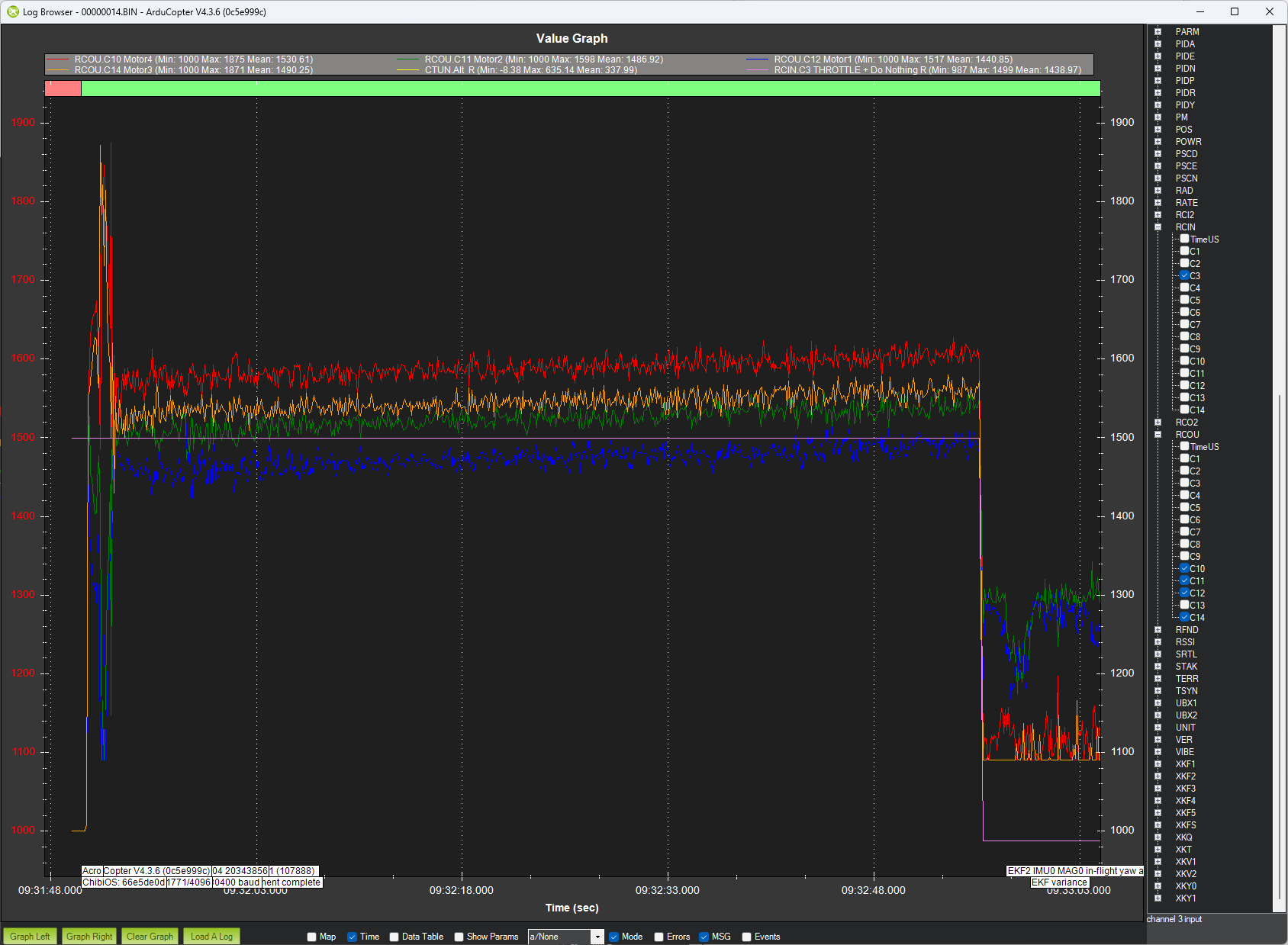
Once the input throttle is reduced it starts coming down.
1 Like
you clearly don’t listen to what I told you earlier thanks for nothing you rude jerk I armed VIA joystick and the RC controller throttle caused the issue which shouldn’t have been enough to even cause the fly away it takes 53% to hover so 50% causing a flyaway like this at a rapid climb doesn’t make sense also this sort of thing can happen to anyone if there isn’t feedback for arming if the throttle is up on the controller. which I would’ve told you but you are such a rude baby that you timed me out for talking to you.
I asked you to look at the log with me since you were in chat at the time of this message but you are to good for that instead we are here publicly having this discussion and learning nothing about the log
1 Like
this user has been banned for abusive behaviour, including threats against Randy and myself
6 Likes
How many accounts are you gunna make m8?