Hi.
When two uavcan gps were connected to the can bus, I became confident that there are errors in the algorithm for averaging gps coordinates. When connecting two gps: one is located on the USART port and the second on the can bus - there are no such problems.
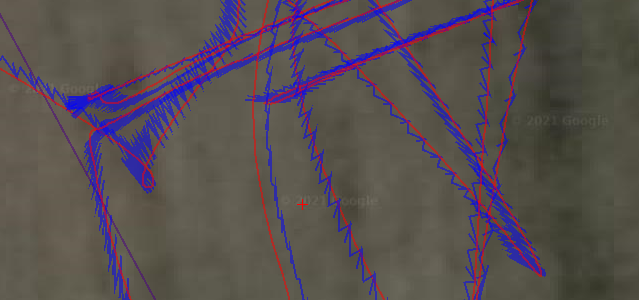
There are suspicions that when two uavcan gps are connected: an averaged virtual flight line is not formed, the flight line is formed somehow differently. Alternately without - averaging, coordinate points are selected from different gps and they are simply connected, as a result, the flight path logging graph resembles a zig-zag - saw teeth.
I can send a flight log. Cube version: orange 4.1. Thanks.