I understand that the Arducopter flight controller firmware is able to monitor heartbeat on a DRONECAN CANBUS. Could this monitoring be used to trigger an alternate custom_mode i.e. from guided to loiter or RTL? When connected to the GCS such a failsafe is available. What about when using an edge/companion computer?
Yes it is possible. It is called GCS failsafe.
Thanks for your feedback. I am looking for a edge computer failsafe where the edge computer is on the drone. The edge computer is an additional computer to the flight controller and can be a Jetson Nano, Raspberry Pi or similar. The GCS failsafe limits me to the ground station which we also use. Am I missing something?
You are missing something, yes.
What am I missing? I do not see a failsafe for another computer besides the GCS. This is what I see in the documentation:
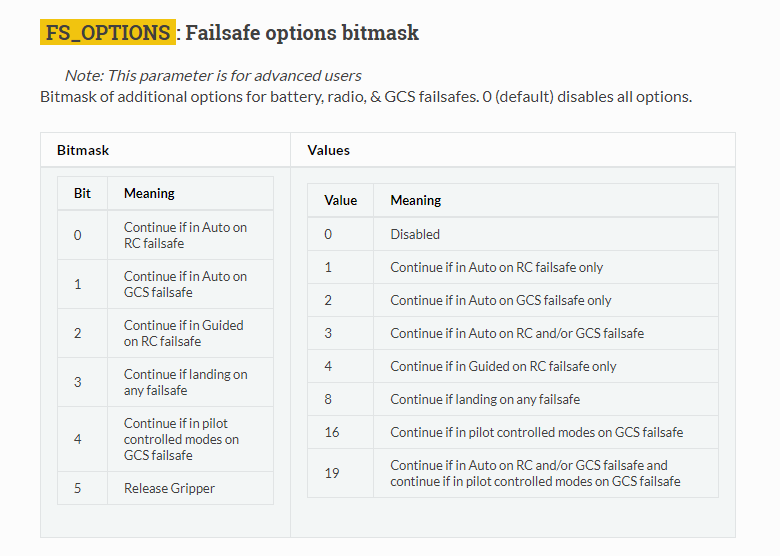
The GCS failsafe is the failsafe for the companion computer.
It seems confusing to me as the GCS is on the ground and the edge or companion computer is on the drone. They are different computers in our case. With us the GCS is a laptop while the companion/edge computer is a Jetson Nano that communicates with the flight controller in addition to the GCS.
It is confusing, yes. But it is the way it works. You need to set a different I’d on both GCSs . And you need to configure the GCS failsafe to only activate when the nano heartbeat stops.
Different ID on both … now it makes sense.