Ron - have you read thru the new tuning instructions in the wiki? I found them very useful in determining where my parameters need to be PRIOR to autotune. They may save you from having to do multiple autotunes.
I am not sure this will fix your flight issues but the Yaw did not auto tune. It’s my understanding that you must land in auto tune mode to save the tune. I see you have shut the 2nd tune off prior to disarming.
Your compass looks ok but lithium batteries are magnetic. The battery placement would concern me because of that. Also: The balance and the tendency to roll hard is increased by the weight being higher.
Thanks for the responses and suggestions. My concern is how to get back to the original settings which were flyable w/o having to do a full reset or do an auto tune again with PIDs which make it flyable
I would reset and follow the link Jeff posted. I have not tuned in a while but I have read the new tuning process. It tells you where to set rates based on configuration/prop size. Exactly what you need.
Why don’t you try lowering the FILT value from 20 to 10 and run the autotune again.
I would also suggest you to replace the batteries, away from the autopilot and gps/compasses due to magnetic field.
I took @xbnr99 suggestion (did a complete reset to default) and am following all the tuning suggestions. My only question is if the recommendations are consistent with the latest release which I build from master.
Not clear on how I can move the batteries to another location.
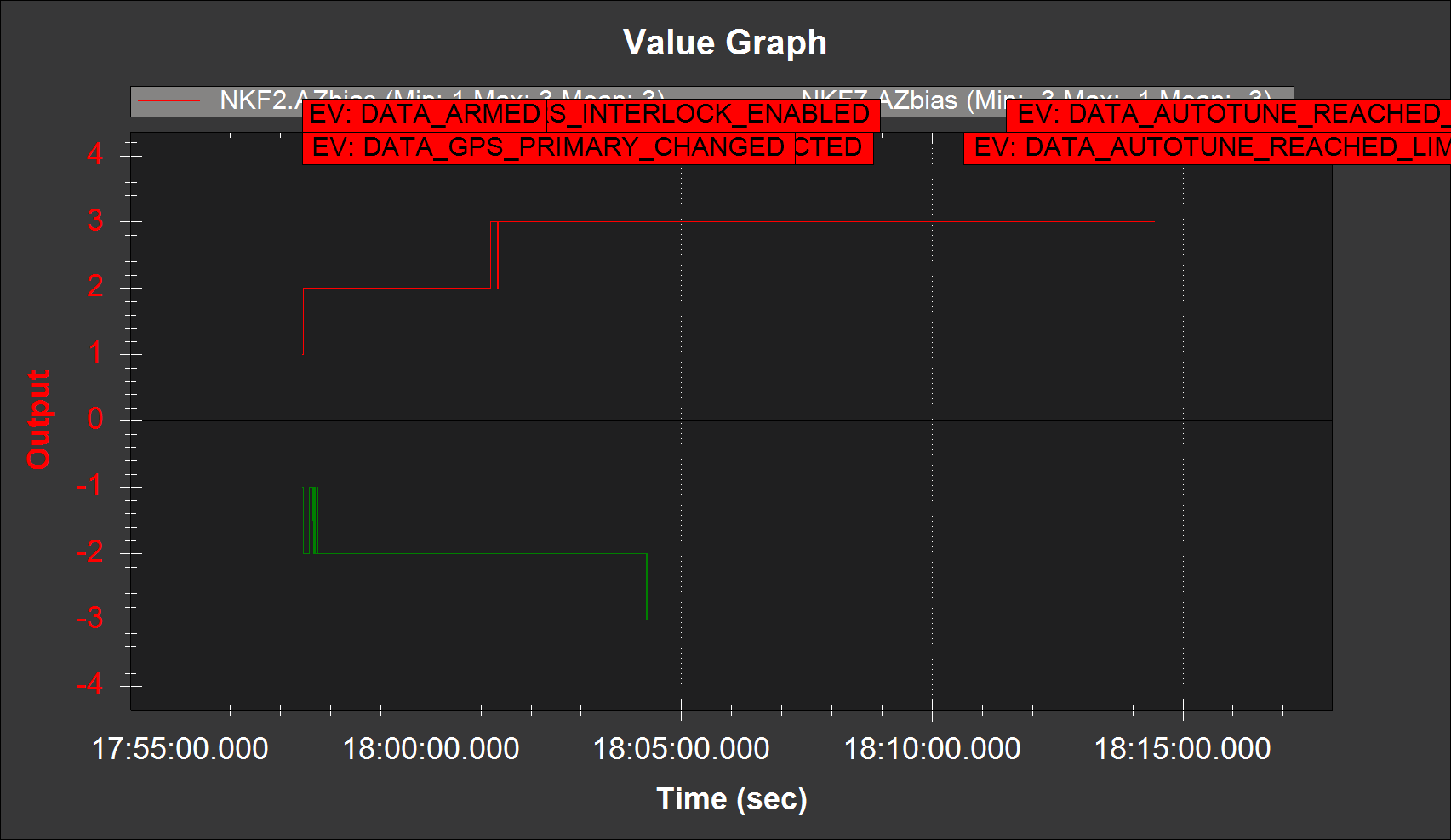
So, I finally got the Octa back in the air with all the tuning suggestions and, it handled pretty well. I just finished an AutoTune session and was looking at the logs. Should the AZ1Bias & AZ2Bias be out of sync like that?
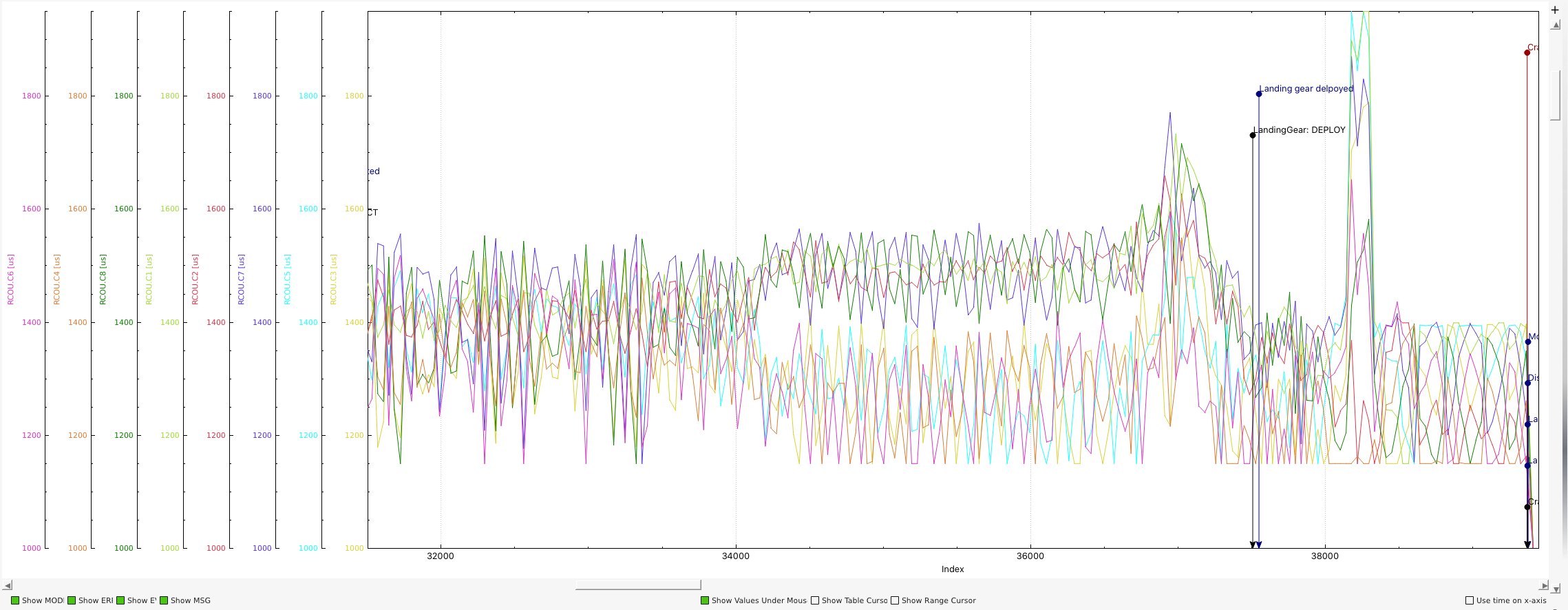
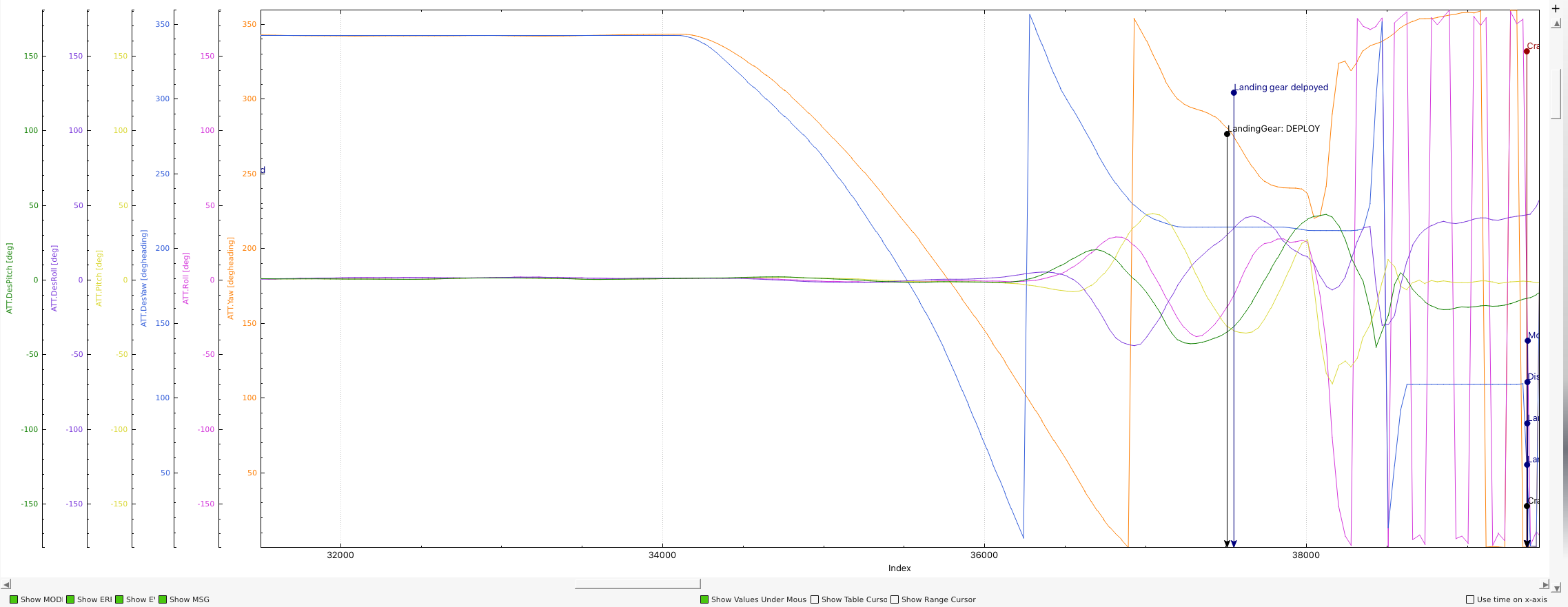
OK - Now I really could use the expertise of the group - your input has been invaluable. My last flight is from above where I completed a full AutoTune successfully and saved the new configs. Today, I flew the Octa for the first time since the AutoTuning and, it was kind of shaking in the air (not a lot but definitely more than it did before the AutoTune). When I tried YAWing, the yaw almost did not respond at all but then started spinning. After about 2 rotations, the copter went completely out of control and crashed hard (lots of repair work but not as much as I would have expect - it’s a tank). Please help me understand what went wrong - is it the auto tune? - Thank you for any insight!
A few things from the log
The copter is overpowered/underweight, which seems to be the main cause of the problem, as the props could not be slowed down enough to maintain stability.
I am assuming you have props > 13" on this but your ATC_RAT_RLL_FLTT and ATC_RAT_PIT_FLTT are still at 20. You need to read the autotune instructions in the wiki.
It has 18” props. This was tuned based on the above starting parameters and then auto tuned. Before AutoTune, it was very stable and responsive with a tendency to over react and apply to much D when returning from a pitch/roll. After the auto tune, it took off fine with a little vibration.but when I started to yaw, it went completely out of control. The motors, propellers, batteries, ESCs are all matched and went through eCalc
Try starting with these params as suggested by the tuning guide for 18" props, some are different than yours and some are the same:
MOT_THST_EXPO 0.73 (was 0.72)
INS_ACCEL_FILTER (10 to 20, not sure) INS_GYRO_FILTER 19 (was 24) ATC_RAT_PIT_FILT 9.5 (was 20) ATC_RAT_RLL_FILT 9.5 (was 20) ATC_RAT_YAW_FILT 2 (was 20)
ATC_ACCEL_P_MAX 61000 (was 40493)
ATC_ACCEL_R_MAX 61000 (was 43776)
ATC_ACCEL_Y_MAX 20000 (was 5760)
ACRO_YAW_P 2.2 (same)
I highlighted the ones I think will be the main culprits. You might not want to change the thrust expo or ATC_ACCEL max ones.
I guess my question is this is the second time I completed an AutoTune and both times after the setting were saved, it flew much worse. Is there a problem with auto tuning heavy lift octacopters.
If you can get it flying well without doing an autotune then that’s perfectly OK. You’ll just have to be careful what parameters you change and by how much.