Itmac79
December 12, 2019, 11:33pm
1
2 Likes
Solhead
March 4, 2020, 8:06pm
2
Hi, can you tell me the PID values you are using? I have problems and I think they are the PIDs. Greetings and great work Itmac79
Hi,
Hello, I already have everything mounted on the tracker with a radiolink MiniPix, everything initially works fine, but as soon as I activate the tracking, Yaw’s servo starts moving bouncing. I include an explanatory video. I understand what are the PIDs? I don’t know how to adjust it, I don’t have much knowledge about PIDs and I prefer to ask people. The yaw servo is a 180 degree modified to 360 degrees. It works perfectly in calibration.
Thanks
aldofad
March 6, 2020, 2:31am
3
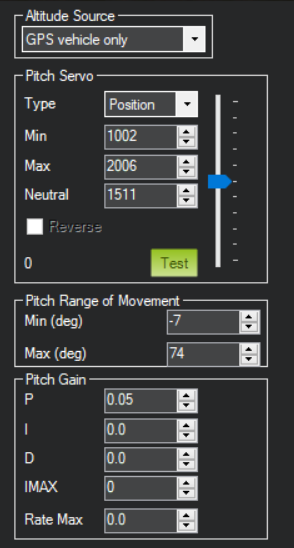
This is an example configuration of my pitch perfectly working.
Be aware that the config tool does not allow you to set values lower than 0.1 (it’s a bug) so you must edit the values from the param list, in this example: PITCH2SRV_P=0.05