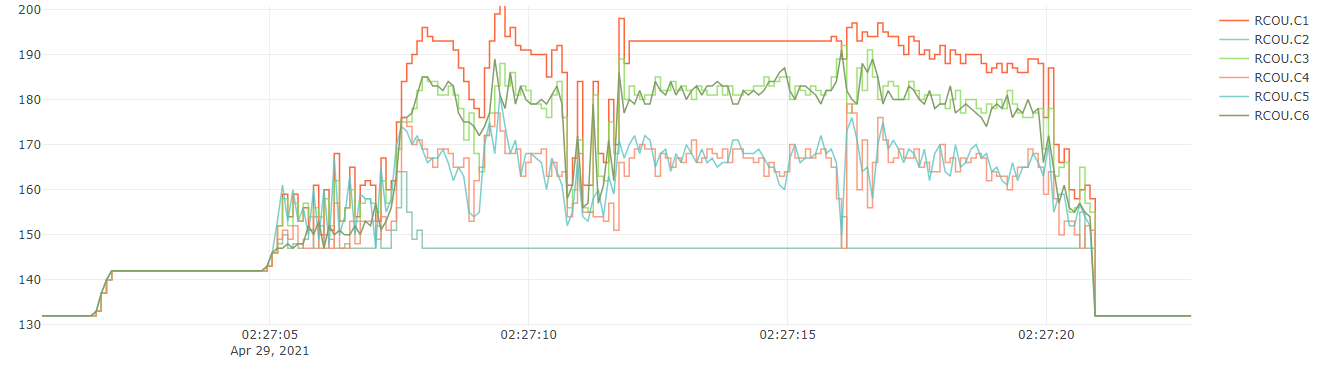
Motor 1 is on maximum trying to lift and motor 2 is on minimum to try and compensate.
And the other pairs: 3 and 6 (CW) on high output to compensate for physical yaw bias caused by 3 and 4 (CCW)
The problems combined mean you are lucky to have any stability and any flight at all.
First fix the weight imbalance then do another test flight. Check if all the motors are operating at about the same output in logs. You might find that CW motors are working harder because CCW motors (or at least one of them) has a twisted motor mount and is tilted compared to the rest.