I’ve been trying to setup our drones failsafe so that when the radiolink is lost the drone will continue on it’s automission, but when the ground control is lost the drone will go to RTL mode.
I haven’t been able to do this, using the FS_OPTIONS and FS_GSC_ENABLE parameters.
What parameters I should modify and how?
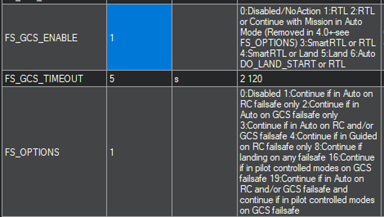
If it’s only Auto Missions to be considered set these:
Thank you, I will try with these settings.