I’m flying AC 3.4 rc4 on a Beaglebone (BBBMINI), pictured below with 3D printed frame. I experienced an unusual landing today. I don’t usually land in Loiter, but today I did, and descended slowly so I could take a look at how the quad was flying.
After landing, I tried to disarm, but the quad listed to the side for a few seconds before flipping over. The props continued to drill into the grass for a few more seconds before my quad finally turned off.
Luckily nothing broke, though my quad is now covered with grass, and one of my motors came loose. I do wonder what I did wrong, or how I might effectively disarm in the future. It is a little alarming to have the quad on its back with motors spinning at full speed, and unable to do anything about it.
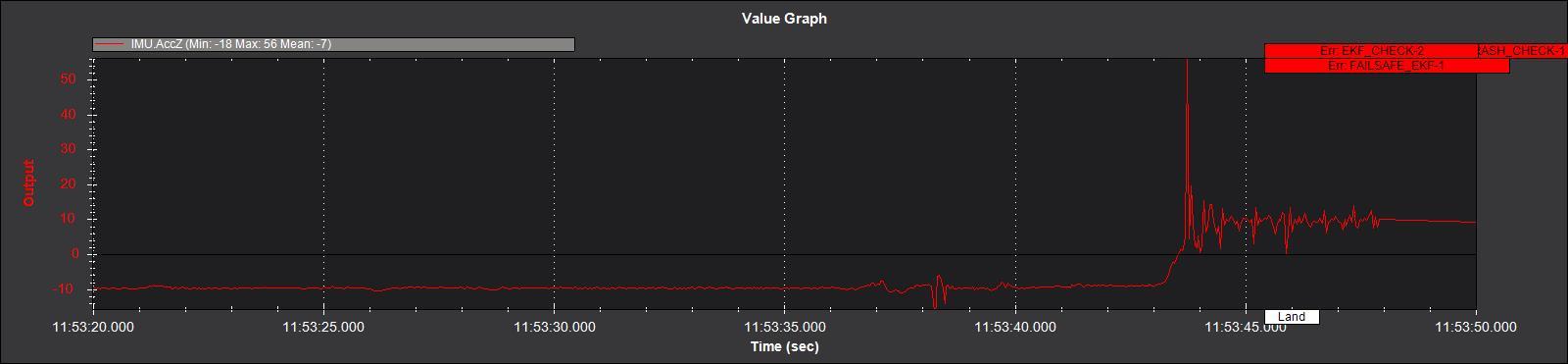
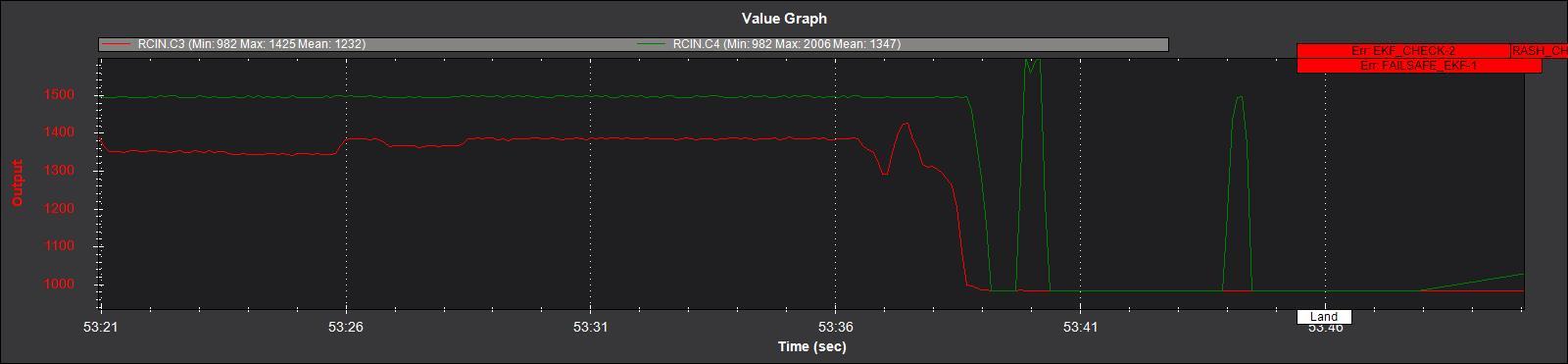
I included a few images from the log file. The first picture shows the commanded and actual altitude. You can see the landing at 11:53:38. Right below that is a picture of the IMU Z, which also shows the impact on the ground at 11:53:38, and shows the quad flip over at 11:53:44. I also show the RCIN, which shows that I attempt to disarm at 11:53:39. The final image shows the commanded and actual roll, showing what appears to be an attempt to track a roll command. There is nothing on the roll stick, so I don’t know why it did this. You can see the roll tilt to 30 deg before flipping over. Finally, at 11:53:48, the crash check registers, 10 seconds after I landed!
Any thoughts?