What do you mean by “hardware expectations of ArduCopter 4.1 telemetry control”? There are a few ways the companion computer can control what data is sent (on the wiki here). It depends a bit on whether the telemetry link is connected to the companion computer (e.g. the companion computer is between the autopilot and the GCS) or the autopilot (e.g. the companion computer is on the far side of the autopilot). The reason is that the data sent from the autopilot can be specified per serial port.
I saw you mentioned on another thread that the wiki says that you should not use a usb cable to connect the autopilot to a companion computer because the battery failsafe will be disabled. This use to be true but we’ve since removed the disabling of the battery failsafe when connected this way. Can I ask where do you see this on the wiki so I can go and revise it?
Hi @rmackay9,
What is effective distance the T265 can reach (outdoor)?? Is it possible to use also Optical Flow in top of T265 to “assist” the T265?
I mean by adding Optical flow, I expect to increase the range and accuracy, or a kind of redundancy… What do you think?? Thank you…
I think the T265 works as long as there are features within about 15m of the camera.
A downward facing optical flow sensor for additional redundancy is supported and this auto switching lua script supports switching to optical flow if both GPS and T265 camera are not working.
A word of warning though is that we still have a bit of work to do to provide the lua script with more info from the optical flow sensor so that it can make good decisions. At the moment the script doesn’t actually know if the optical flow is working well. It does know if GPS and T265 are not working but it can’t actually tell that the optical flow is working.
Thanks rmackay9! I figured it was something like that. The only way I could get it to work previously before it worked with the Pixhawk1-1M image was through udp, which is frustrating because I want to use my Telemetry sik radio and connect that to pixhawk I don’t know why it gets broken but it’s been that way on fmuv3 and Pixhawk1 I guess as long as I can remember. Sucks that we can’t use the Pixhawk components that come in regular kits if a person wants to connect a companion computer (I use a rpi4). I think I tried getting this thing looked at like 10 months ago by ArduPilot devs but nobody seemed interested. Frustration I downloaded the Copter 4.1 codebase yesterday and made an assumption the bug beaking it on fmuv3 and Pixhawk1, but allowing it to work on Pixhawk1-1m was probably something in the build scripts and the ChibiOS HAL API interface. My buddy suggested I would of been done by now if I wrote your own custom flight controller😂 at that point I said screw it I want to be done I’ll just configure dragonlink which put bad feeling after a flyaway with an early beta, I just figured companies like dragonlink that have the radio modem integrated are benefiting so nobody wants to fix it, or it’s intentional, because it’s the most basic functionality that I would expect to work and it doesn’t and nobody seems interested and everybody acts like nobody is using it when probably the majority of people using pixhawk and ardupilot are using those things when they first start out and then they realize they can’t use them anymore for what they bought them for.
Thanks for letting me know that UDP works that’s kind of good news.
My guess is that the telemetry issue you’re facing is a bandwidth problem. So once the companion computer is attached, the telemetry radio simply doesn’t have enough bandwidth to send all the data to the GCS that is coming from the autopilot and the companion computer.
I think I need more information to really help though.
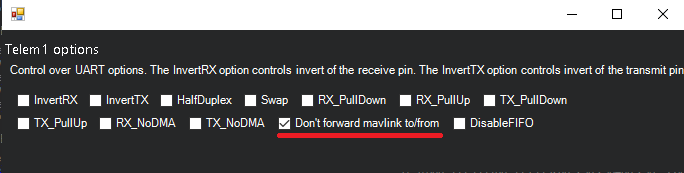
One thing that may help is you can turn off the passthrough of mavlink data from so that the GCS cannot communicate with the companion computer. The companion computer and GCS will still be able to communicate with the autopilot. This can be done by setting the SERIALx_OPTIONS parameter for the serial port connected to the companion computer.
By the way, if things don’t get fixed in the AP code it is just because the developers are very busy. We never purposely don’t fix something because someone gains financially. That would be immoral and we don’t do that. It’s quite the opposite, we try hard to keep even very old, cheap hardware working as long as possible.
For the tips. I’d love to know what the ideal latest and greatest commercially available hardware for ArduPilot is and where to purchase it. If I know what to buy, I will buy it. In fact I need it. I think it’s important to recognize it’s not obvious which FC to buy, and who is a reputable seller. Most beginners buy that stuff because it’s what they can find on Amazon, or another online purchasing platform. Its been 3 years playing and trying to develop on top of pixhawk-px4, and ardupilot and I still don’t have a good source. PLEASE, share. It’s pertinent to success on your platform, and I get asked the same question from people all the time, and the best I can say is Pixhawk 4. There is so much misinformation out there.
Re the best hardware to use, we get asked this a lot but normally we just refer people to our list of supported autopilots here because it depends so much on the individuals budget, vehicle and environment.
If the cost and size of the autopilot is not a factor then I would generally recommend an autopilot with an H7 processor, built-in vibration isolation and an IMU heater. There are at least 3 manufacturers that make autopilots like this though and I suspect any of them are quite good.