Hello everyone,
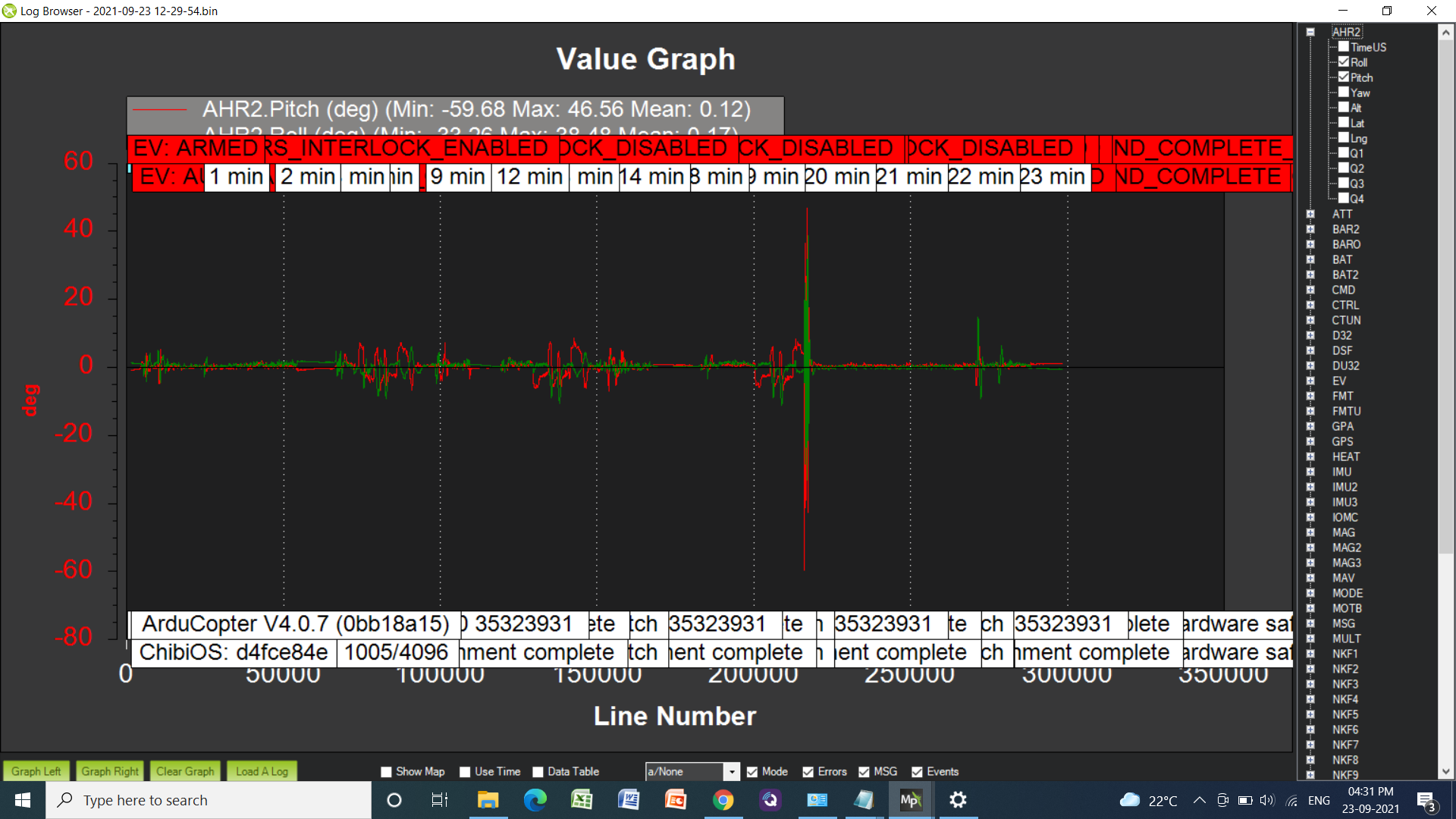
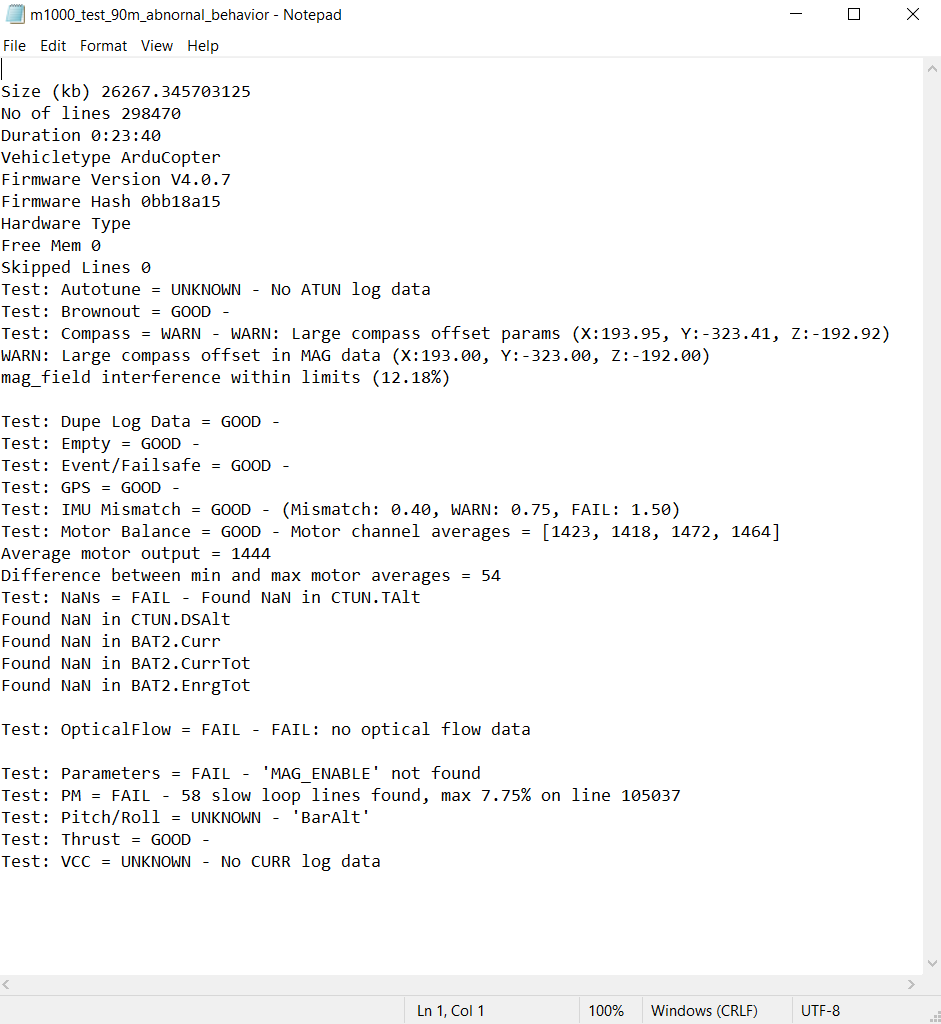
We have got a problem while doing a mission with cube black FC and T-motor M 1000. The drone started a pretty scary erratic movement in pitch and roll axis on switching to ‘land’ flight mode after completion of an autonomous mission. I request the fellow pilots, developers and enthusiastic community to please help us to find the error. I am attaching the flight log and the video of HUD from mission planner for reference (google drive link attached).
Update: As pointed out by Mr. Dave, I have uploaded the .bin flight log in the same google drive. (Thanks Dave)
https://drive.google.com/drive/folders/1nitypMNe9GRM5Q9-i7kPVVzZfwVc8We8