Hello, I’m a first time poster so let me know if I’m doing anything wrong.
Yesterday I was doing some basic tests with a Bixler 3 using a Pixhawk 4 autopilot with ArduPlane V4.3.5. Everything was configured properly according to the Plane documentation, except for the PIDs, which weren’t tuned yet, but the plane flew well enough with the default settings. And everything did work perfectly (manual and FBW flight, automatic navigation and landing, and basically every other feature I tested), except for one thing: automatic takeoff. Instead, after a hand launch, the plane just kinda went along with throttle on. Stayed straight for a little while, but not perfectly straight and definitely not climbing at the expected angle or direction, and after a while it just began turning erratically at much lower of an altitude than specified by the TAKEOFF mission item.
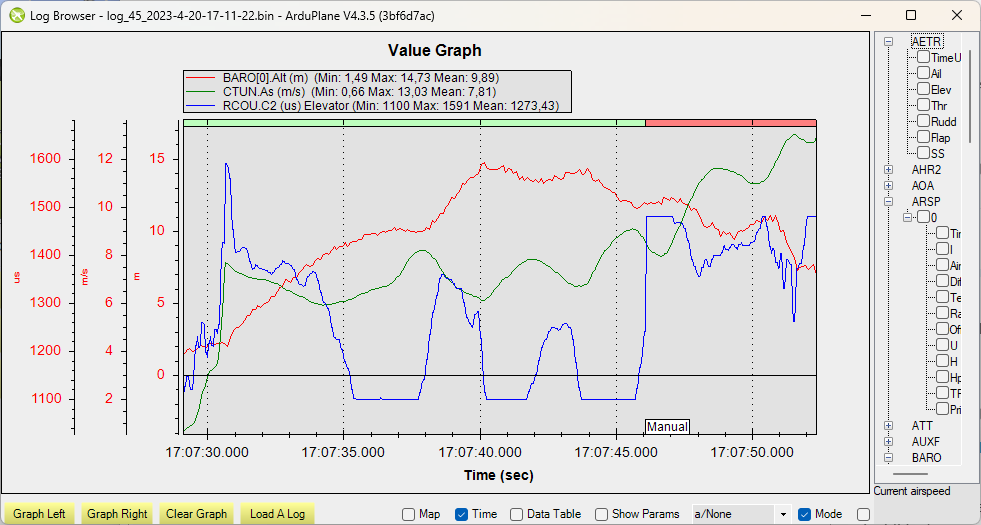
I’m very new at this so even after analizing the telemetry I’m still not sure of the problem, but I am pretty sure that the autopilot isn’t doing the actual navigation that is expected of the takeoff and instead is just kind of hanging out with the throttle on, hence why it climbs for a bit, and as the Bixler is a pretty self stable aircraft it doesn’t crash but instead just does a few random turns. The following log is of one of the many flights we tested the auto takeoff. In this particular one it was done in auto mode with a takeoff mission item but we also tested the takeoff mode itself and got the exact same behaviour. It’s worth noting that we also experimented with all of the parameters mentioned in the Automatic Takeoff docu page, and a few others with the TKOFF_ prefix, to no luck. In the log we just have the throttle set to start as soon as the mode is set to takeoff, but setting it to start after hand launched made no difference.
At least to me, this is all made so much weirder because of how well the autopilot works in every other aspect. The navigation within flight, including making level and straight climbs like we are expecting of the automatic takeoff, works perfectly. So do automatic landings which obviously are much more complicated. What am I missing?
Also maybe worth noting, the only other unexpected behaviour we noticed is that right after booting up, in any stabilized mode, the elevator was in the correct position to keep the correct angle in flight (TRIM_PITCH_CD set to 450 or 4.5º). However, after a flight, the elevator was deflected upwards considerably when in a stabilized mode. This was fixed after a reboot. SERVO_AUTO_TRIM is off and in manual the elevator was level. It probably has nothing to do with my main problem, but I’ll leave it here just in case and also because it would be good to know what causes that as well.