Hello Ardupilot forums,
Today we had a THRUST_LOSS episode mid-flight, which forced us to stop the mission and bring the drone manually back. This drone is a large coaxial drone (2 x X4) that is intended to lift a 12 kg payload, for an AUW of around 25 kg.
This drone had successfully flown hundreds of times with the following battery setups:
• x1 16000 12S 15C
• x2 16000 12S 15C (in paralell)
• x1 22000 12S 25C
• x2 22000 6S 25C (in series)
• x2 28000 6S 25C (in series)
However, this time we tested the drone with x2 25000 High Voltage 6S 10C (in series), and for that reason, we set the following:
MOT_BATT_VOLT_MAX = 52.2 (4.35 V per cell, a total 12S).
Another change made was the following parameters to mitigate the gimbal oscillation:
PSC_VELXY_P from 1 to 0.6
PSC_VELXY_I from 0.5 to 0.3
PSC_VELXY_D we left it as 0
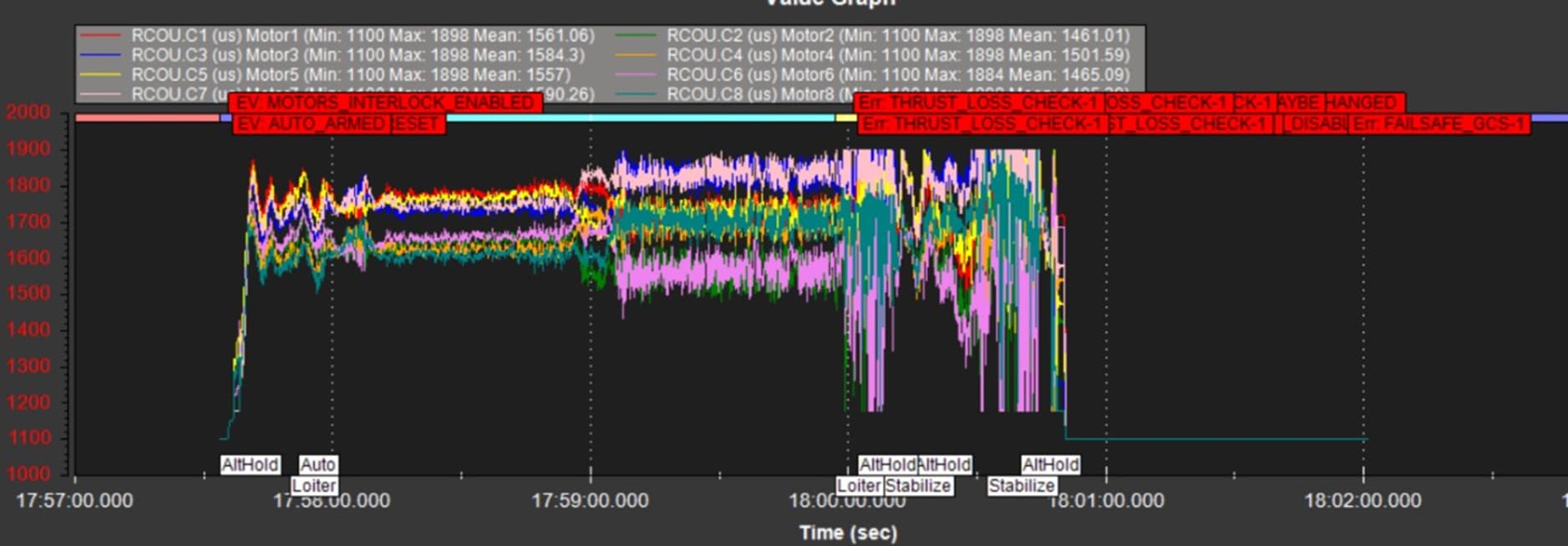
That resulted in a flight that starts well, but mid-flight it gets pretty noisy and then starts losing control, as seen in the motor outputs after 17:59:
Here is the link to the log file:
https://drive.google.com/file/d/1hCmVaQ3YRQeHDUdxmhsnLk7xXS4QpRj2/view?usp=sharing
Did we screwed up changing the MOT_BATT_VOLT_MAX?
Did we screw up by changing PSC_VELXY_P and PSC_VELXY_I?
Was the problem due to the low C-rate of this batteries with respect the previous setups that have worked in the past?
Perhaps a ESC calibration error (due to the HV batteries)?
Was maybe a motor/esc malfunctioning? Or even worse… was anything malfunctioning in the energy handling on the dron (PDB, etc?)?
Thank you for your time.
David