Hello –
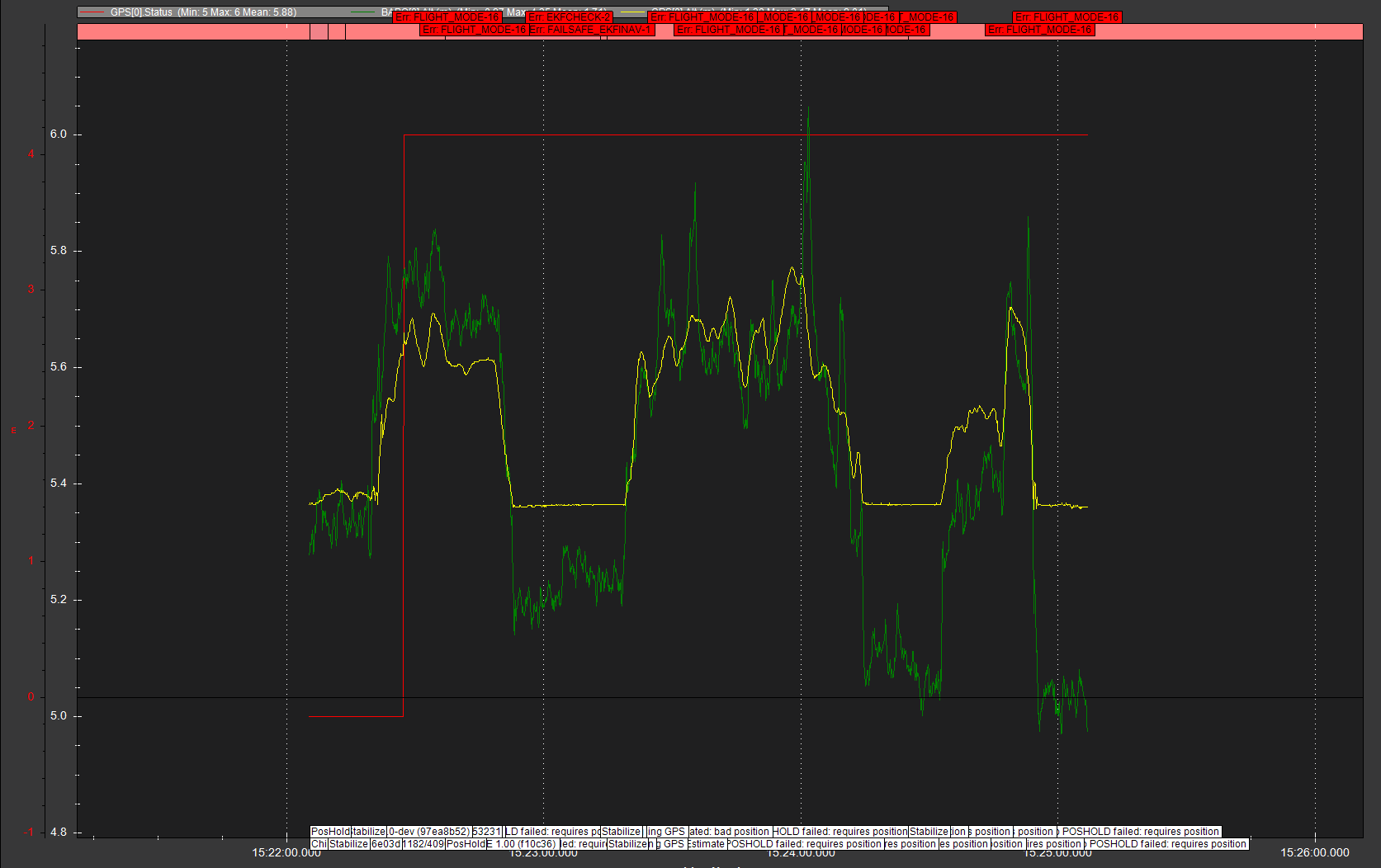
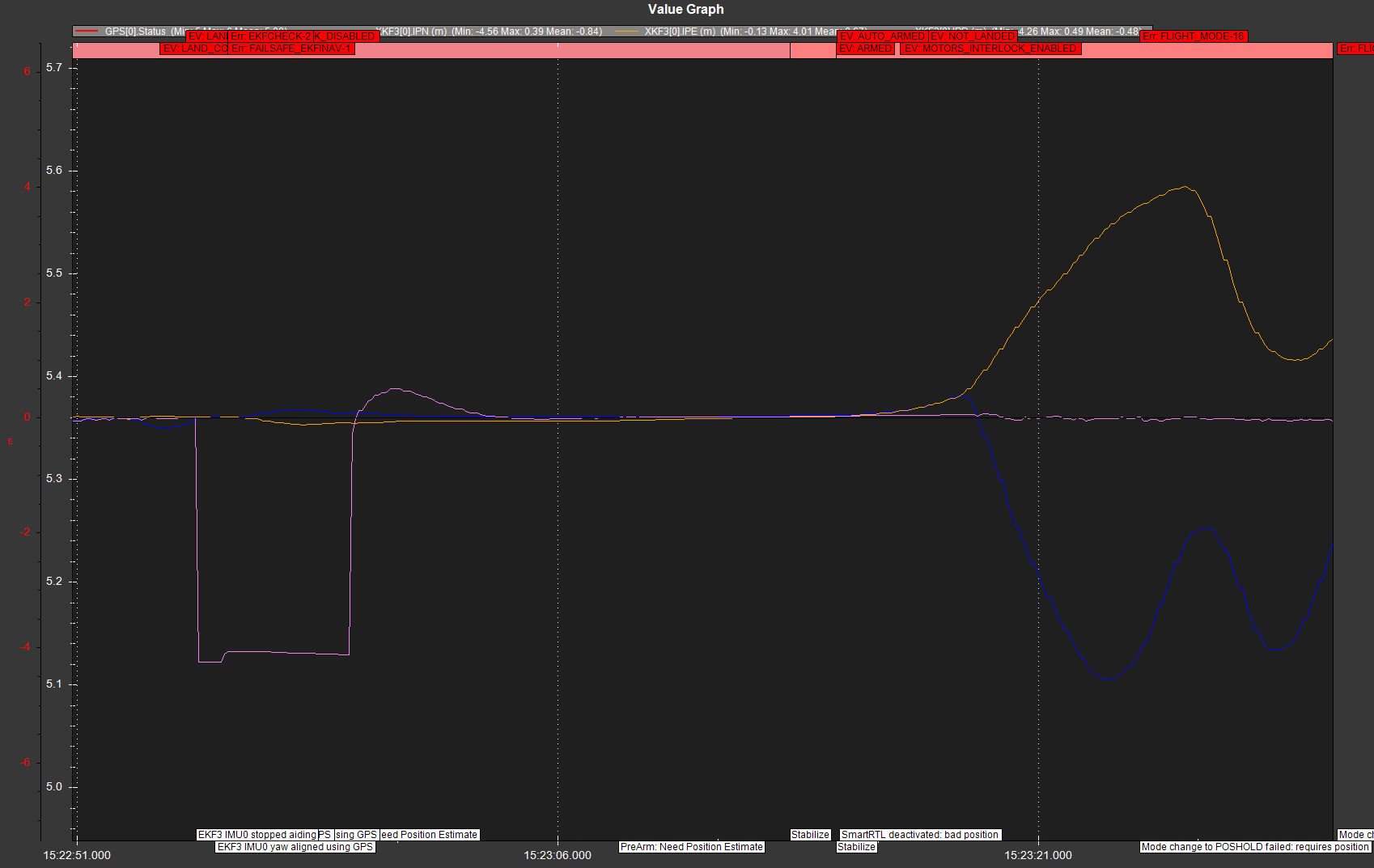
I am running into this series of errors that prevent GPS-based simple PosHold on 4.1/4.2-dev. The parameter settings are meant to enable GPS as the primary position source for XY and Z (this is a ZED F9P RTK board in rover mode [not moving base]). I consistently see messages such as “core unhealthy” and “IMU stopped aiding”.
In the attached log file,
- I try arming in
PosHold, and it doesn’t arm (“Need position estimate”), even though the RTK module is in Fix mode. - I can arm and take-off in
Stabilizeand the second attempt to switch toPosHoldworks, and the vehicle holds position. - Once I land, this switch to
PosHoldis never successful.
I’ve checked the logs for Vibrations (foam-mounted MPU6000), and those look ok. The only thing is that the innovations in EKF PD and VD are sometimes excessive - no idea why.
Any help/directions welcome! This has been a problem for a while now. I have previously used Pixhawk 2.4.8s and CubeBlacks without issues on 4.0dev.
Current setup: 5" props, DShot150, w/ Kakute F7, external I2C compass. The ZED-F9Ps get
good RTK-Fix.
Any ideas on what might be off? Hardware/software?
Thank you!