Start by connecting to MissionPlanner, Setup / Mandatory / Initial Parameters
Put in your prop size and battery cells, accept everything it offers including the suggested settings.
Then set
ARMING_CHECK,9718
INS_ACCEL_FILTER,10
ATC_THR_MIX_MAN,0.5
PSC_ACCZ_I,0.6
PSC_ACCZ_P,0.3
MOT_SPIN_MIN,0.13
Try these Compass setting and see if that helps:
COMPASS_OFS_X 484
COMPASS_OFS_Y -43
COMPASS_OFS_Z 327
COMPASS_DIA_X 0.881
COMPASS_DIA_Y 0.800
COMPASS_DIA_Z 0.800
COMPASS_ODI_X 0.200
COMPASS_ODI_Y 0.200
COMPASS_ODI_Z 0.079
COMPASS_MOT_X -10.000
COMPASS_MOT_Y -10.000
COMPASS_MOT_Z 6.948
COMPASS_SCALE 1.00
COMPASS_MOTCT 2
It was a bit tricky to get magfit to work without a GPS - supply your actual latitude and longitude and I cna run it again.
Keep a copy of your original settings in case you need to put them back, but we can always extract them from a .bin log.
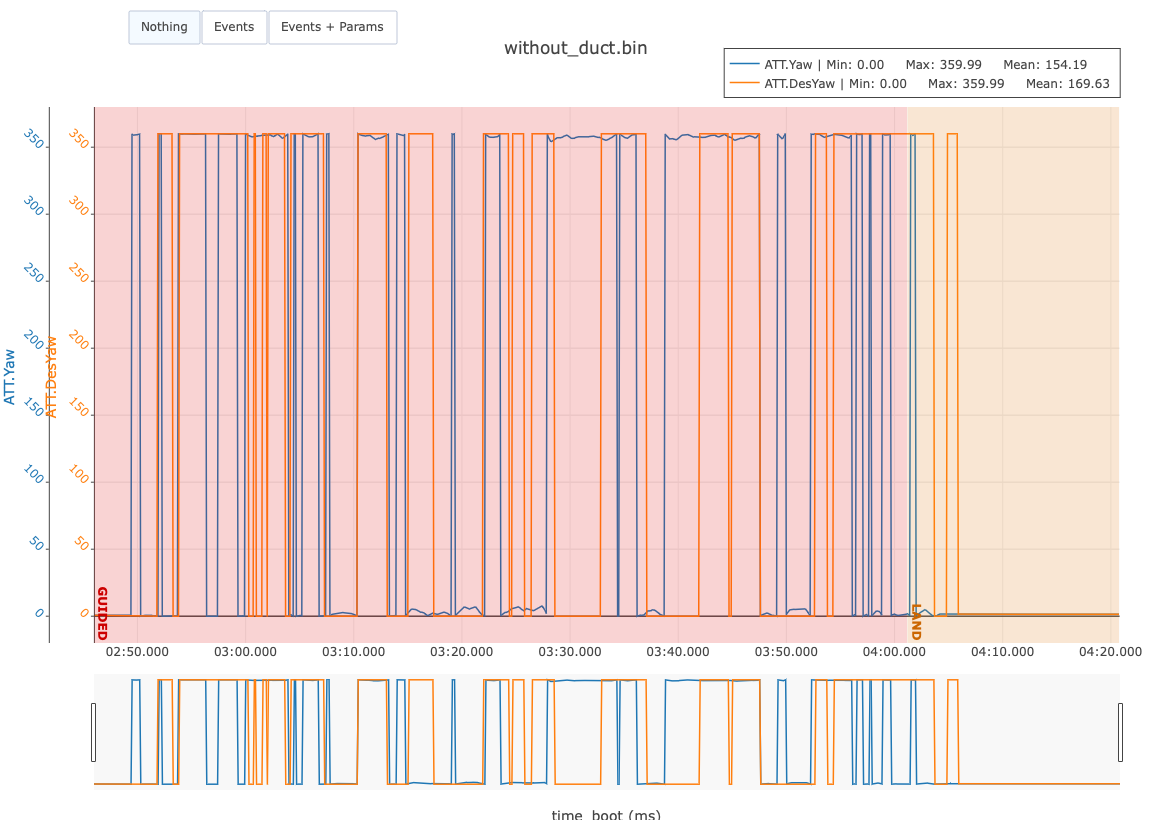
Once the yaw is under control you could run Autotune.
I’m wondering if one or more of the ducts are too close to the prop tips causing an issue for yaw authority??
Cant hurt to fine tune the compass though, I’d need your real lat and long