Has anyone tried using these foxtech Nimbus motor tilts for a belly sitter? They look decently beefy.
Could the servo be setup to til 90 degrees the other way as well?
Has anyone tried using these foxtech Nimbus motor tilts for a belly sitter? They look decently beefy.
Could the servo be setup to til 90 degrees the other way as well?
This is the second tentative of fixed wing flight. I am happy of the result.
During the first flight I have got long period oscillations of ±10° so I moved the CG about 3mm forward and the result is very good. An interesting fact is ±10° oscillations correspond to a range of 40 PWM of servo throw. You can imagine how precise must be the linkages. This is probably due to large surface of flaps together with the CG at the limit.
Also the average power needed to fly FBWA is about 55 W. Who said dual motor tailsitter is power hungry ?
Congratulation, the verry best Tailsitter Flight in all Modes so far.
We can see, it makes fun!
Otto
That’s amazing! Really stable flight!  ️
️
Very good!
What static margin do you use now?
Can you post a log?
So we see again how sensible this configuration is to the CG. I doubt it is a good configuration for transporting varying stuff 
Static margin is 4.5 %
Next WE I will make more test in order to move a little the CG. I also have to add airspeed. I can see some small pitch oscillations in the log, 5 to 10° of magnitude, but I do not see them while flying. I think a big problem is the quality of flaps servo, you will see that while flying fbwa or Auto the PWM range used is very very low, less than the gear play.
I use Corona fast HV servo connected to a 6V BEC
https://hobbyking.com/fr_fr/corona-ds-319hv-digital-metal-gear-servo-4-2kg-0-05s-34g.html
They are very very fast but have some amount of play, not bad for a low cost metal gear servo but maybe too much for these large flaps.
https://www.dropbox.com/s/fvo1unh6j7cxl1i/batwing.BIN?dl=0
I think the wing is able to carry more weight but of course the CG must remain at the same position for all 3 axis.
@losawing Congratulations on the batwing, very impressive performance.
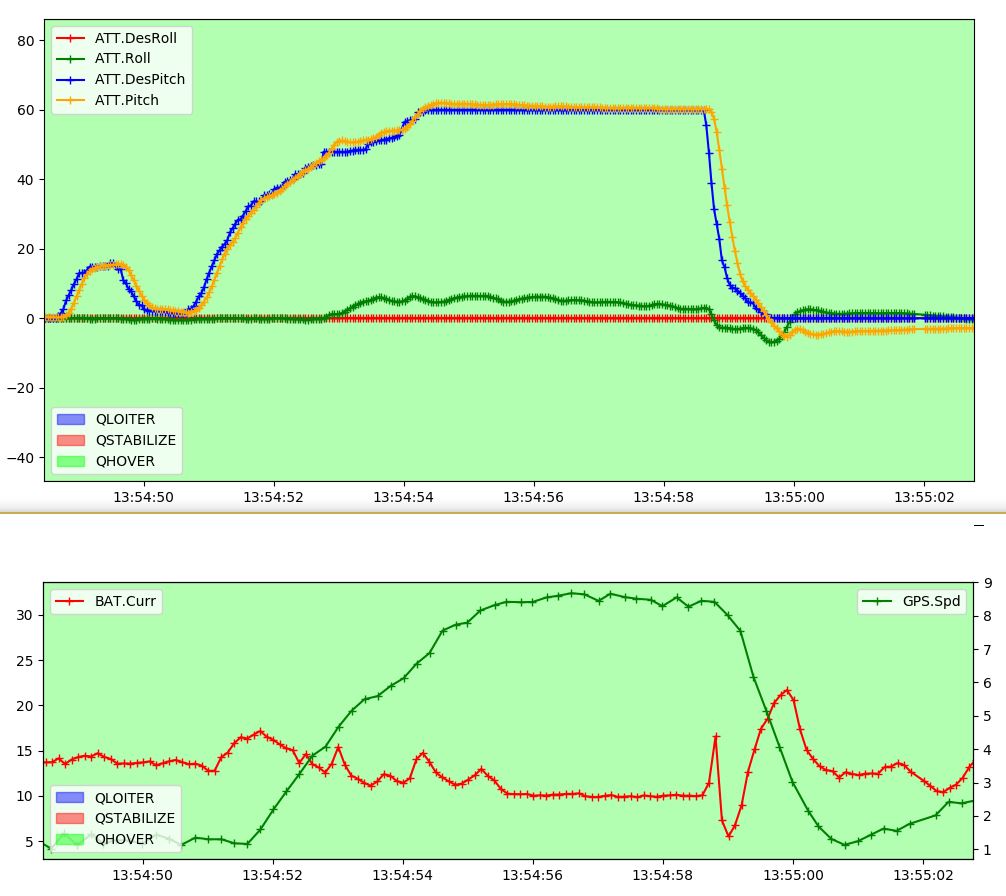
I got my little quad tailsitter back in the air with new BLHeli_32 ESCs and it flies pretty well at all pitch angles in VTOL modes. Here’s a plot of total current vs GPS speed as pitch goes from 0 (nose up) to 60 degrees:
Thanks for the update on your project. To begin with something not too fast and get experience is probably the faster solution.
Yesterday, I have been able the reproduce the bad back transition with my test wing and the quad configuration. After 4 or 5 successful test transitions I switched to manual and made some loops, then the EKF went red for few seconds, I switched back to FBWA, tried a first back transition that failed and a second one that also failed. I still don’t understand what the problem is but I am working on it.
Were you testing using my new branch pr-quadTS?
I’m not seeing any problems with transitions in SITL:
But I haven’t tried using manual mode; it could be that is exposing a bug.
update: just tried several transitions from MANUAL to FBWA and QHOVER in SITL, and only had 1 problem: transition from knife-edge manual flight to qhover remained in knife-edge, but that’s an airframe limitation, not a bug.
FYI: Wingtra wrote a little “Quadplane vs Tailsitter” comparison.
Also anyone tested the (NEW!!!) QAUTOTUNE feature yet?? I have no tailsitter at the moment, so please guys test this and provide tridge with feedback! ![]()
There is some advice for tailsitter:
NOTE : QAUTOTUNE does not work on axes that need feed-forward. This means it doesn’t work on the pitch axis in tailsitters. If you want to QAUTOTUNE a tailsitter then make sure the pitch axis is disabled by setting Q_AUTOTUNE_AXES=5. If you do use QAUTOTUNE on the pitch axis of a tailsitter then you will end up with a very bad (completely unflyable) tune.
Thanks for the link, not sure I really agree with any of there points.
Having played with both there is a lot to be said for quad planes, defiantly not as cool as tail sitters tho.
No I am still testing the stryker_quad branch. I made a clone of pr_quadts but the the method I used to compile with MAKE does not work anymore. The wiki say that to use MAKE is now not recommended. I also tried the cygwin method but again it was a failure. I am afraid I am very bad at all kind of computer related stuff !!
Nevertheless I have been able to reproduce the bad back transition a second time using the same process: several good transition/manual acrobatic flight/EKF red/ FBWA/ transition /crash. Hopefully the plane is very though. Every time I had a bad back transition, the EKF turned red for few seconds (I see the messages with telemetry logs). At high speed with the jetwing I had error velocity or error position message. I have the same messages when I fly manual with my test wing. I have to mention that both the test wing and the jet wing use old ublox 6M GPS and maybe they are not accurate enough. I think I will load on my test wing the last arduplane firmware in order to make the same flight test. I will see how it behave. If I get a bad transition again I will try to improve the hardware.
I put pr-quadTS binaries for fmuv3 and fmuv4 here: https://drive.google.com/drive/folders/1l_PMXpI779nPMB29gL-kbAb_w2e1Clj2?usp=sharing
Let me know if you need a different build, and I’ll add it.
Hey! I’m making quite a large tailsitter right now and have 20kgcm servos with a combined motor/prop weight of around 400g at around 5 cm above the servo gear, so I have around 2kgcm of torque during static operations. I was wondering what you guys are seeing during real flights. I assume that the torque is higher with the moments applied by the props. It seems like this servo should be good enough but will definitely test before. I just want to see how y’alls servos are holding up right now. I would love to get my hands on higher quality servos but I can’t seem to find anything other than the ones linked from aliexpress that make it easy to design a tilt mechanism for and are also 180 degrees.
These servo should be very good for your application. According to my small experience with them, JX servo are strong and reliable.
Just to compare, I use for my vectored Tailsitter Skywalker 6 this Hitec Servo: hs-5245mg
Rated with 6V 5.5 cmkp stall torque, but measured max torque 3.15 cmkp at 1.1 Amp.
And 2 electronic failures fortunately on ground. (First to see in the video below)
Nown as high quality but only high price.
Motors Quanum MT4108-580 100 gr, Props 12x5.5 with 12 gr each.
More infos: https://drive.google.com/open?id=18VjNNKl4wUGIbkGbB4Y7qWhGF6GRBe7e
this is done.
I am really impressed. I thought my tailsitter was well tuned but I have to admit than the autotune do a better job in 5 minutes instead of hours. Only the pitch axis has to be tuned manually.
did you try a pitch autotune? would be interested to see how it did, maybe we could improve the autotune to work better in this case.
Awesome! If you could upload a video of the wing while doing autotune would be cool!
Am I right with assuming that you need a kind of working PID setup before you can do autotune? I mean we can not just put it into autotune without it even flying at all, right? So we need to make some basic PID tune before. Whats the most easy way there? With the rig is quite complex.