Ok, so if doing the motor test doesn’t spin the right motors, it is a problem with the way the signal cables are arranged. But if it does work, it would be a problem with the power each motor is getting, and to fix that would I just have to get a new ESC?
After confirming that the order is right you will probably have to check that the Low RPM Power Protect function in the ESC firmware is turned off. It’s usually turned on by default for higher kV motor use. Unfortunately because you have an obsolete Flight Controller it cannot work as passthru for BLHeliSuite which would allow you to easily change this parameter.
In summary even if you fix a potential motor order problem you will still want to disable this function as 700kV is borderline with it turned on. I would scrap that Flight Controller and replace it with an up to date one. BTW-Arducopter 3.2.1 is the latest version the APM will run not 3.1
So the APM board 2.8 can’t work as a passthru for the ESC firmware? And if not, is their another way to access the settings without getting another flight controller?
No, it can’t. That functionality wasn’t added to Ardupilot until long after that FC became obsolete. Before this was possible with Flight Controllers that will passthru (Pixhawk, many others) I used a cheap Naze32 board running an old version of Betaflight to access ESC’s running BLHeli. But this wouldn’t make any sense for you because for a bit more $$ you can get a Flight Controller that will run the latest Arducopter firmware. There are various cheap “USB Linkers” around that say they will connect with an ESC’s running BLHeli but I’m skeptical that they would actually work.
Ok if I get a Readytosky PX4, would that be fine for a while?
Sure, that will be fine. I have a few of those Pixhawk 2.4.8’s and they all work well.
Out of curiosity (looking at the photo) what is the All-up-weight (incl battery) of that craft. What power (3S, 4S, ?) and what props.
The AUW with the battery is about 2000g more or less. I’m running Garrt 3508 700kv motors with a 40amp ESC and running it all off of a 4S battery (3500mah).
And the props you have on there now?
I have RayCorp 1147 Plastic Props
OK, it looked like a bit of a heavy load but that should fly. Not for long but the thrust to weight isn’t bad.
I may have another idea to get it flying, so you said that given that the motors are placed right with their signal cables, the problem would be configuring the Blheli firmware to turn off the Power Protect function that is used for higher kv motors which I can’t do with my board. And I just happen to have 4 extra 2836 1120kv DYS motors, so what if I put those motors on the drone with the 1147 props and because they are higher kv I wouldnt have to worry about the flashing. Would it work fine with my setup (thrust, wattage, ect.) and would doing that method remove the problem?
Why don’t you confirm the motor order and see if it resolves the problem 1st. As I noted 700kV may be borderline with Low RPM Power Protect meaning it might work. It would be a shame to replace those Garrt motors with those DYS motors but thrust wise it would be OK. However, the flight time would be even less as the efficiency is poor.
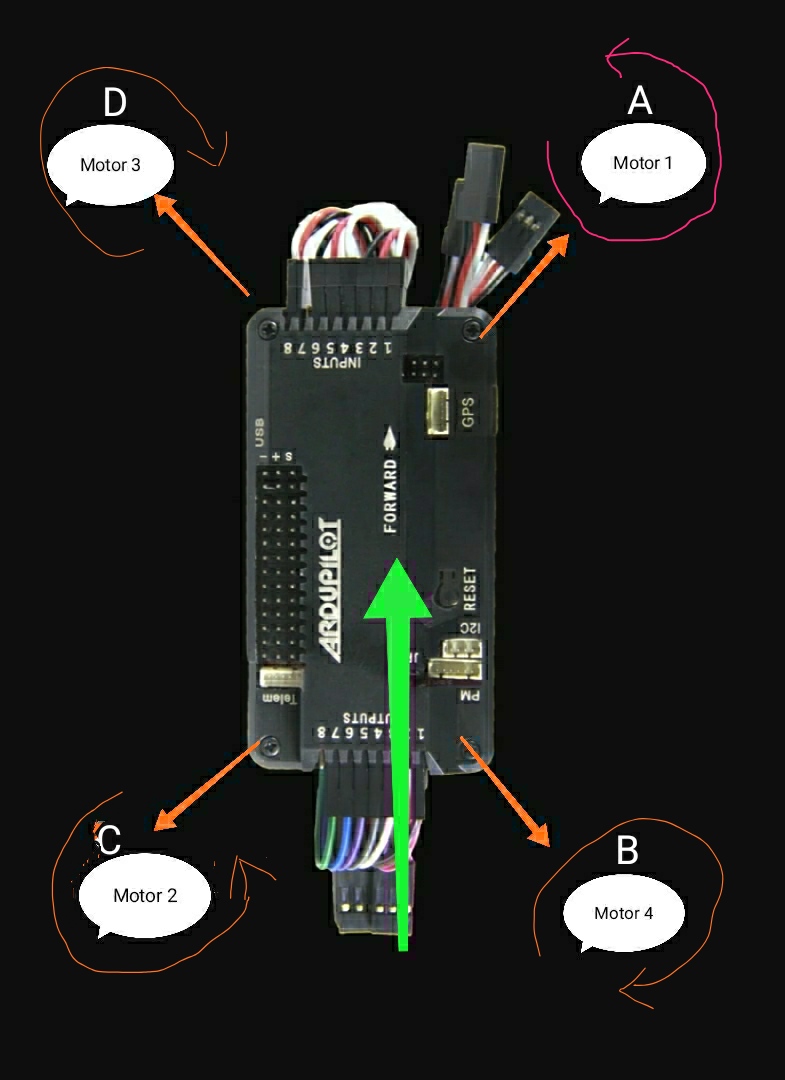
Test the motor order. That is almost always the problem when tipping at takeoff
Ok so as it turns out, I did not have the motors in the right order. So after I tested to make sure A was Front Right B was Rear Right C was Rear Left and D was Front left and they were. However, I still had some problems with my stick input spinning the correct motors faster (like moving the right stick to the left in a roll would turn the left motors faster and not the right ones) so I went on my Tx (FSI6X) and reversed the roll channel which I think fixed it. Unfortunately, after I had presumably fixed the problem, my battery turned out to be defective I think (the cells were not balanced at all (the second cell had 1.2 Volts while the other ones had around 3) and it didn’t charge) so I most likely will have to get a new battery preventing me from testing for a short period of time. But given that the motors did not work when they were plugged in to the wrong ports, do you think that moving them to the correct ports fixed the entirety of my stability/takeoff problem?
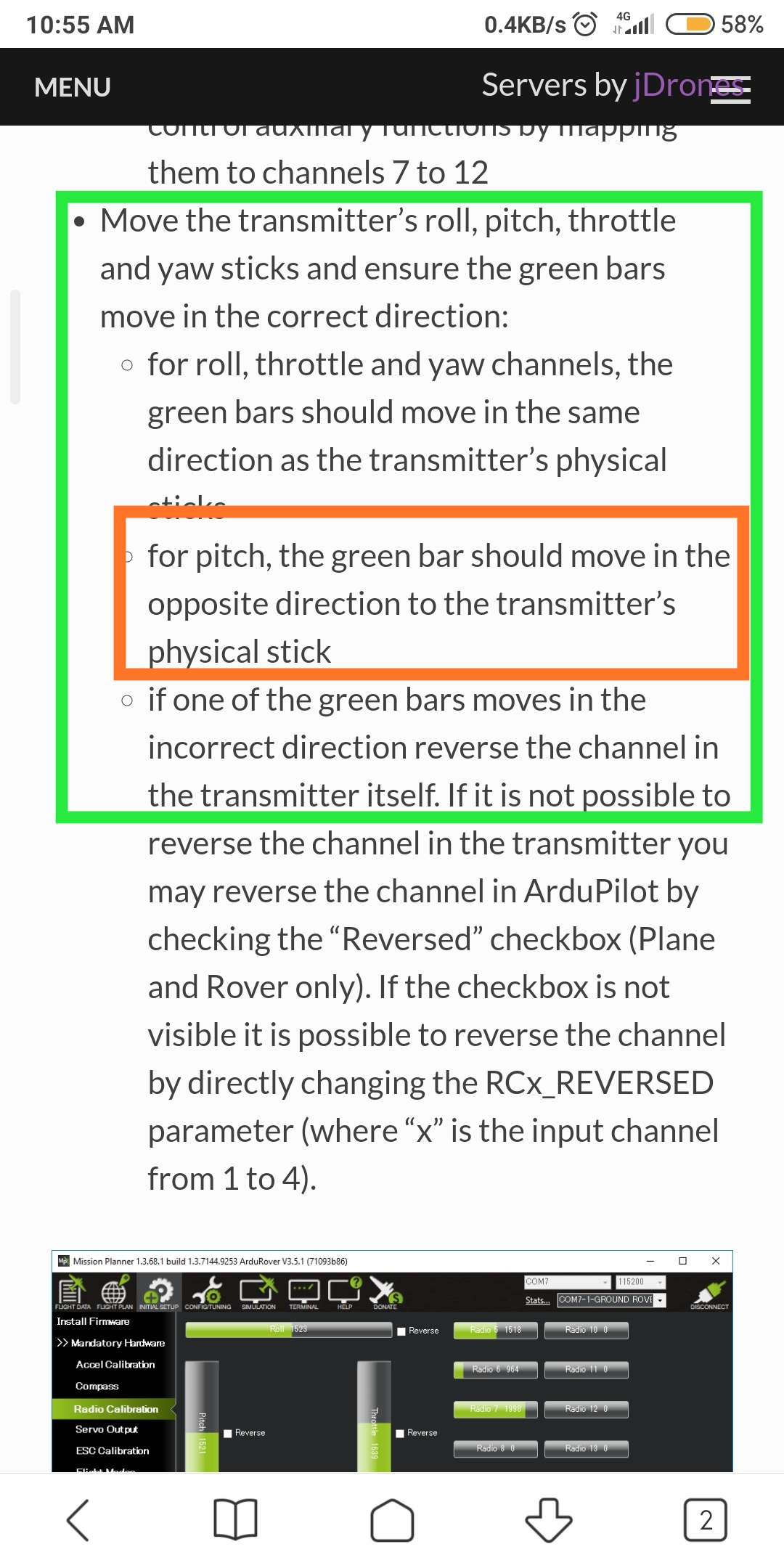
In normal cases, Pitch must be reversed in Transmitter for arducopter to work. Haven’t heard of Roll. So check all connections again, & the FC orientation.
My mistake, I just checked my Tx and I reversed Ch2 which I then checked and it was, in fact, pitch and not roll. So you are saying that having an inverse pitch is normal and it is not a motor wire problem and just something you have to do in all quad copter build? Just asking in case I ever experience this sort of problem in another build.
Thank you, everyone who responded, the drone is now able to takeoff and fly, though I am noticing some minor drifts, should this be fixed by trimming on my Tx or is there a method to trim on the FC.
Again, thanks to all who helped.
Never use the Tx trims on a multirotor. What Flight Mode is it drifting? Performing a good accelerometer calibration is key but of course some flight modes will drift anyway and require pilot action.