Hello all,
I am attempting to read IMU data. So far I have done two different ways. One is with Dronekit useing the add message listener. See results below. The curve appears to have duplicated points and is jagged.

The second way is using recv_match as shown in this example:https://gist.github.com/vo/9331349#file-gistfile1-py-L36
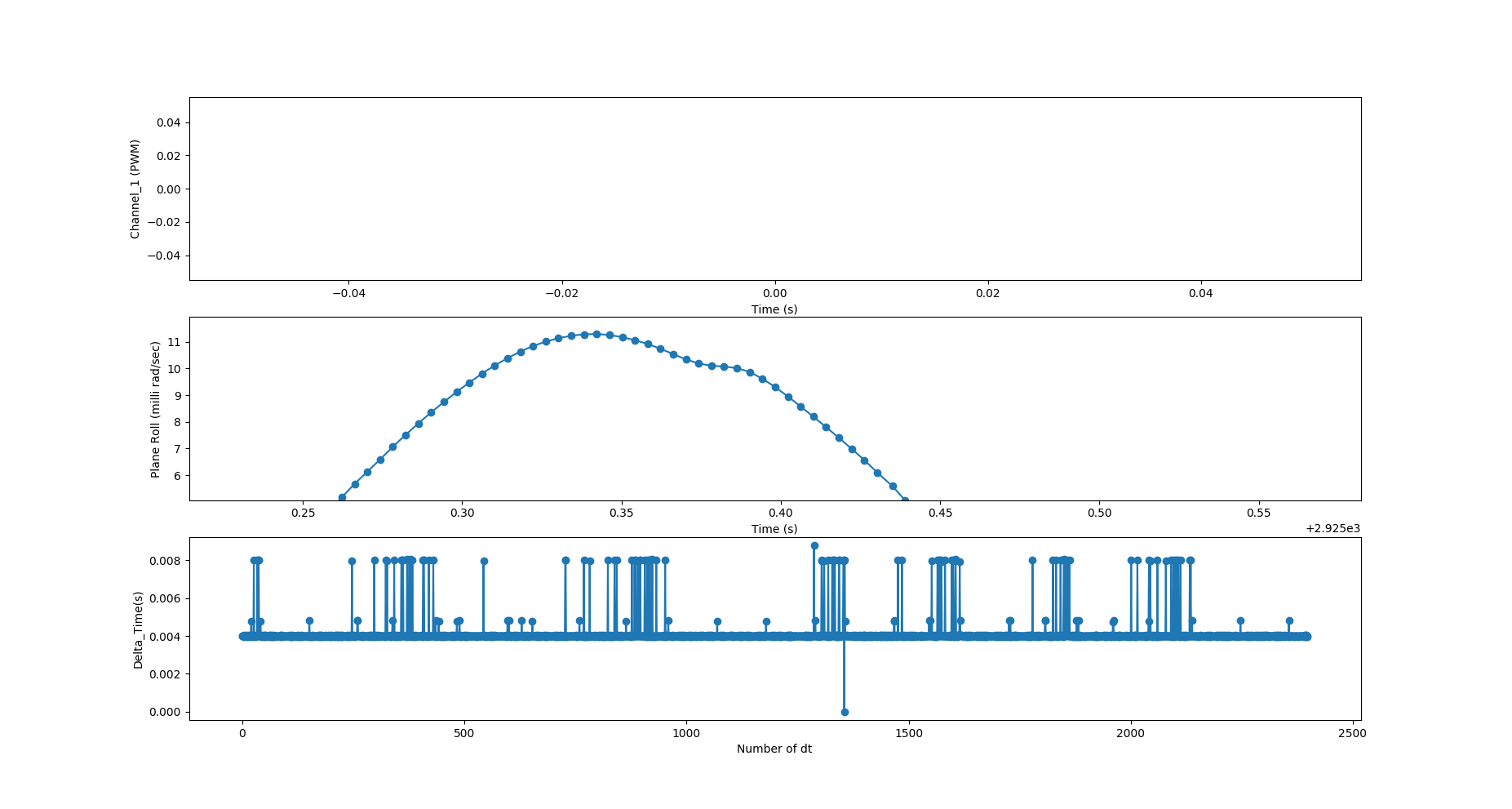
looking at the middle plot the line is vary smooth with no repeated points!
I am trying to figure out how Dronekit gets Mavlink messages to figure out why my results are varying. I see that it is using this line here to add_message_listeners to get the messages.
https://github.com/dronekit/dronekit-python/blob/master/dronekit/init.py#L542
My question is dose Dronekit use recv_match when add_message_listeners is called?
recv_match is in pymavlink/mavlink