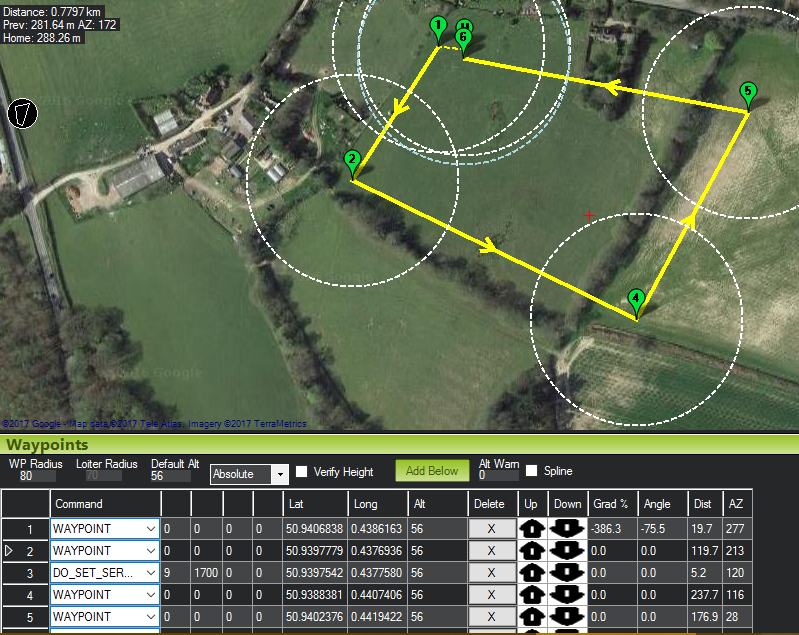
I want my lights to come on at waypoint 2 (see attached screen shot of Mission Planner) and go off at 4.
Waypoint 3 is the DO_SET_SERVO command.
Have I done it correct or is there another command to turn them off again? I am using a receiver controlled switch which works well.
Also, do I need to remove the lat and long coordinates from the DO_SET_SERVO command?
you’ll need two DO_SET_SERVO commands, one to set the switch high/on, and again to toggle low/off. It may be worth adding a third, at mission start, so that you can be sure what state the switch is in. Check what the switching PWM value is, and make sure your commands are sufficiently higher or lower than it - ie if 1500 is the switching value, 1700 is a good value for HIGH/ON, but if 1700 is the switching value you would want to set your pwm to 1800 or something.
OK, so where would I put the second DO_SET_SERVO command?
Would it go before or after waypoint 4. I want the lights on between 2 and 4 on the above mission planner.
Still not quite sure how it works as my waypoint 3 which is the first DO_SET_SERVO command doesn’t show in mission planner.
Thanks
at waypoint 4. Basically you want the Lat/Long for the DO_SET_SERVO commands to be close to / the same as the nav waypoints they are associated with.
Last question… Any idea what the switching PWM value is for a Turnigy receiver switch? I can’t find any documentation and have no idea what ranges are normal.
I’ve set it for 1700 on and 300 off as a guess. Does this sound a good starting place?
Thanks
Normal RC pwm range is 1000 - 2000, so I’d guess that 1800 is a good high value, 1200 a good low value.
Thanks. I’ll try it out Monday. Too much wind and rain until then.