Hello,
I noticed strange behavior in PosHold mode. When switched from Stab to PosHold copter immediately starts descend, until it reach the ground. Descend rate is slow around 0.5 - 1m/s and seems to be constant.
Could anybody point me what to tune up to get rid of this danger behavior?
Copter is of version 4.1.5. Parameters are set to default, still not able to auto tune it until it descends in PosHold.
I attached log file from the flight
Without looking at the log file, I can think of one reason this might happen - the throttle is still active in POSHOLD. Are you certain that it was in the neutral/hover range? Did you try raising the throttle to arrest the descent?
Yes when raised the throttle it reacted on it. And yes it was in neutral/hover range. I managed to hover it in Stab and then switched to PosHold.
Is it possible to read from log file the throttle was active in PosHold? What should I look for?
Ok, your throttle is set to RC channel 3, which has min and max values of 1107-1940. The throttle deadzone (THR_DZ) is set to 100µs, meaning that the mid throttle hover range is 1423-1623µs.
After reviewing your log, RC channel 3 has extended periods lingering below 1400µs in ALTHOLD and POSHOLD, so the Copter should be descending, per expected behavior in those assisted modes.
We can also compare CTUN.ThO (throttle output) to your learned MOT_THST_HOVER parameter of nearly 0.3 and see that much of the time, throttle output is below the learned hover throttle, meaning that, so long as you followed the tuning steps, a descent would be expected.
You can set THR_DZ between 100 and 300, and if you’re having trouble finding the mid-throttle position that corresponds to a “hold altitude” command in these modes, set a value higher than the default of 100.
Overall, unless I’m missing something, your Copter did as it was commanded, and it would appear you aren’t using the throttle command as intended for ALTHOLD or POSHOLD modes.
1 Like
As Yuri says your MOT_THST_HOVER value (ThH) was still being learned:
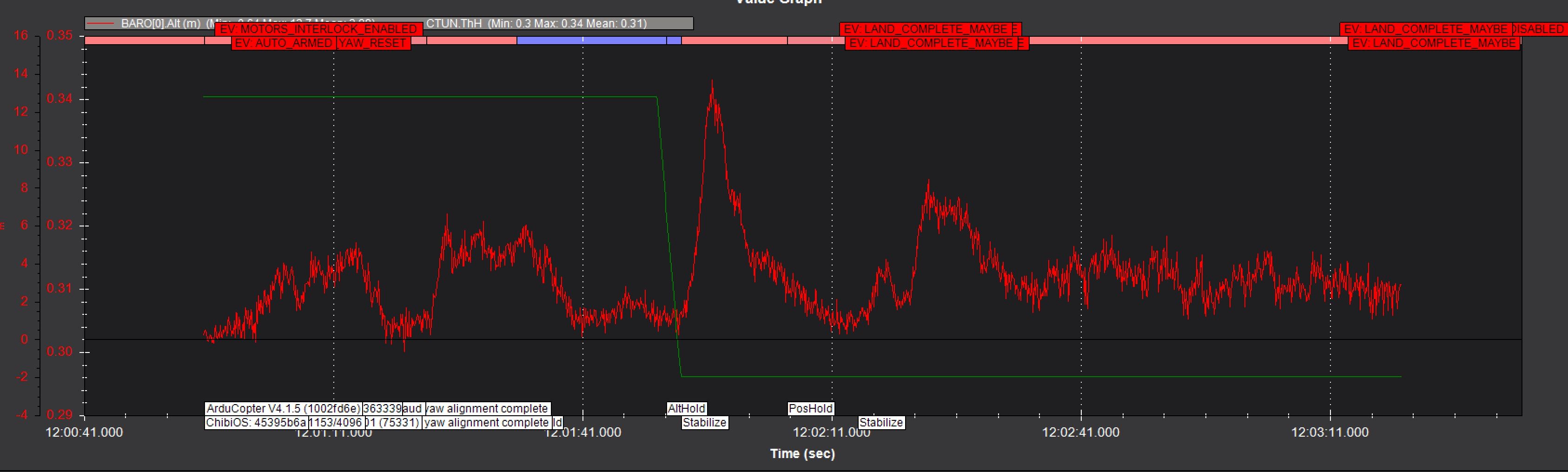
Hover in an assisted mode for awhile so this can stabilize.
1 Like
It’s also important to note that the throttle position in STABILIZE mode that results in a hover may not perfectly exist at the mid-throttle position (although it should be very close once MOT_THST_HOVER is learned). As soon as you switch to an assisted mode, the throttle behaves much differently than in STABILIZE. In the assisted modes, a perfectly centered throttle stick is the signal for the Copter to hover at altitude. Below THR_DZ, it will execute a controlled descent, and above, a controlled climb.
- If the throttle stick is in the middle (40% ~ 60%) the vehicle will maintain the current altitude.
- Outside of the mid-throttle deadzone (i.e. below 40% or above 60%) the vehicle will descend or climb depending upon the deflection of the stick.
What I can say - I’m very thankful for your exhausting explanation Yuri. Will change/increase THR_DZ or rather wait for MOT_THST_HOVER is learned.
Again - thanks a lot.
I find that the default THR_DZ works for me, but the mid-throttle deadzone it provides can be a bit narrow. If you still have trouble after the hover throttle is learned (hovering for 30-60 seconds in ALTHOLD should do it), try a value of 200.
1 Like
After a while copter started to keep level in assisted modes ![]()