i have 4 bateries , two connected series 6s + 6s and power two motors and second pair for second two.
it’s not connected to FC. It’s connected to my own controller.
i don’t know at this moment how i can connect it to FC for controll energy ( 2 x 12s , 2 x 120A )
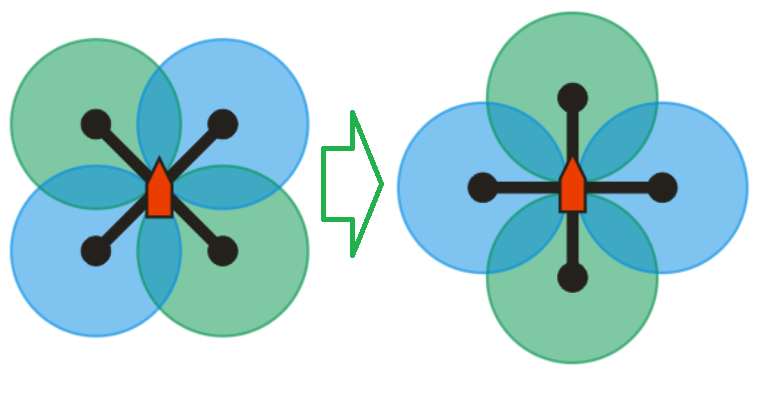
I think that is main problem because it’s maked not simetrical thrust for X type frame.
if you think that better idea is PLUS frame configuration ?
Then for Pitch will be simetric and for Roll will be simetric.
Now LeftUp and BottomRight proppeler are on different level than RightUp/BottomLeft
Maybe it’s main problem for FC ?
Interesting question and I’m not sure. My sense is it won’t make a difference. I suppose you could test just by changing the AHRS_ORIENTATION by Yaw 45 , and same for the compass.
not, orientation of sensors are separate question - soft recalculate only real value before using in alghoritms. It’s all. (recalculate inputs). Front of drone is still where was.
Frame type definition how and wchich motors are using for Roll and Pitch. (recalculate outputs)
Definitely use these settings for the T-Motor Flame ESCs:
MOT_THST_EXPO,0.2
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
1 Like
Don’t understand what you are saying. Tell the FC it’s Yaw 45deg , set the frame type for + and it’s now a plus configuration with motor 3 in the “front”.
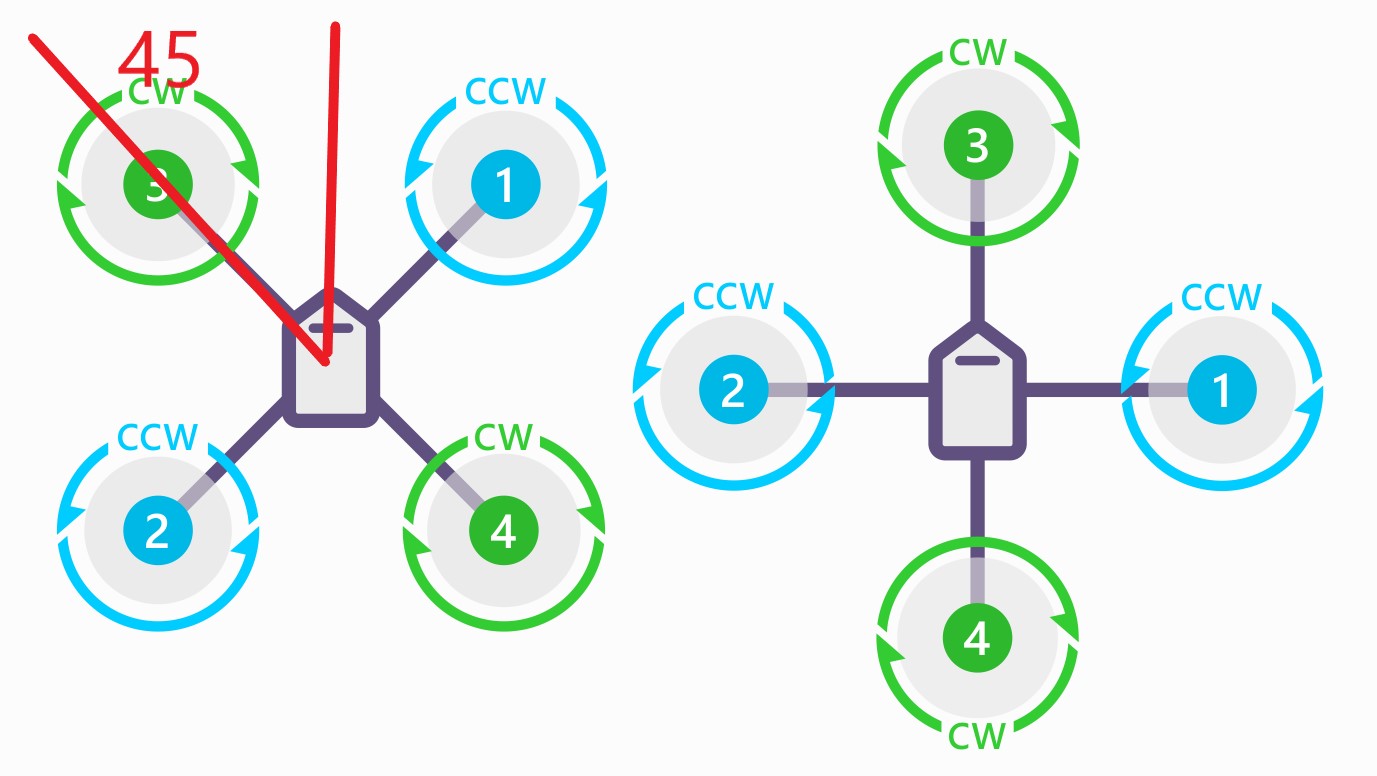
Yes, it’s true with change for plus.
Previous i bad understanded you.
I’m tested it with very bad result (after AutoTune too).
In ardupilot docs can read :
Warning
Some ESCs (T-Motor Alpha and some Flame series, and possibly others) have built-in linearizing curves and the default EXPO value of “0.65” will cause stability issues, requiring thrust stand measurements to adjust the EXPO. Typically, values of “0” to “0.2” will result.
I think that my Flames are not linerity and need EXPO 0.8, it’s more better,
T-Motors support isn’t good, they can’t reply me if my ESCs (firmware) are with linearity function.
i don’t know where is my problem with very big overshoots when go to horizontal position from big angle.
i will try tuning is manualy but i haven’t experience.
Has T-Motor or it’s resellers actually replied to anyone with hard facts about the ESC models and liniarization? If so I have missed it.
You were going to replace the odd ESC, did you do that?
[/quote]I tryed to found this information in internet and asked sellers, t-motors “specialist”. I’m producer of electronics too and can’t understand why they can’r reply. Incompetent.
Has T-Motor or it’s resellers actually replied to anyone with hard facts about the ESC models and liniarization? If so I have missed it.
Yes, now i have all the same old models. I test motors with test mode on different % and looks that all have the same rpm ( to 50% because more i can using in my garage )
OK, I sent T-Motor the following email:
Hello,
Can you please tell me which, if any, of your ESC products have thrust liniarization as a function in firmware? This is relative to their use with Ardupilot where thrust liniarizatiuon is configurable in firmware on the Flight Controller. If your ESC firmware is performing liniarization then it would not be appropriate to enable this in the Flight Controller firmware.
Thank you,
Dave
And I received the following response:
Dear Dave,
ESC does not have this setting.
It is usually set by flight control.
Thanks.
Best regards,
Liam Xu
Sales & Tech Department
1 Like
I think that they more like you than me 
I observed the same and replyed (better fly with expo 0.8, very bad with 0.2 ). This question is clear.
Maybe today i will try tuning pid manualy by ch6
i still reading about it, but can’t understand some question.
I have used the Manual Tuning process as described here (page down to it) on most craft and it has worked well. It can be very time consuming but fun also.
https://ardupilot.org/copter/docs/tuning-process-instructions.html