Hello to everyone. I apologize in advance for translation errors.
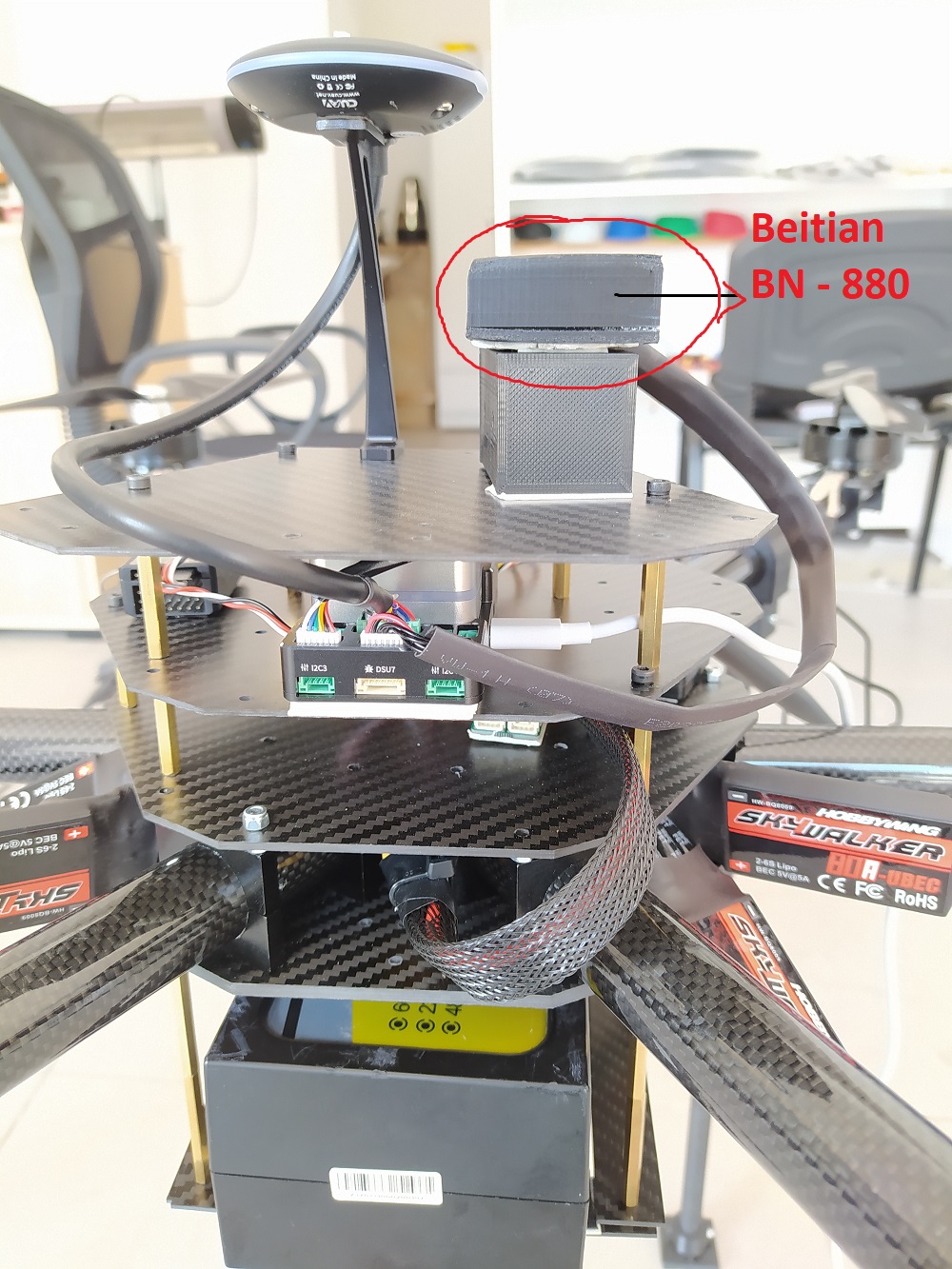
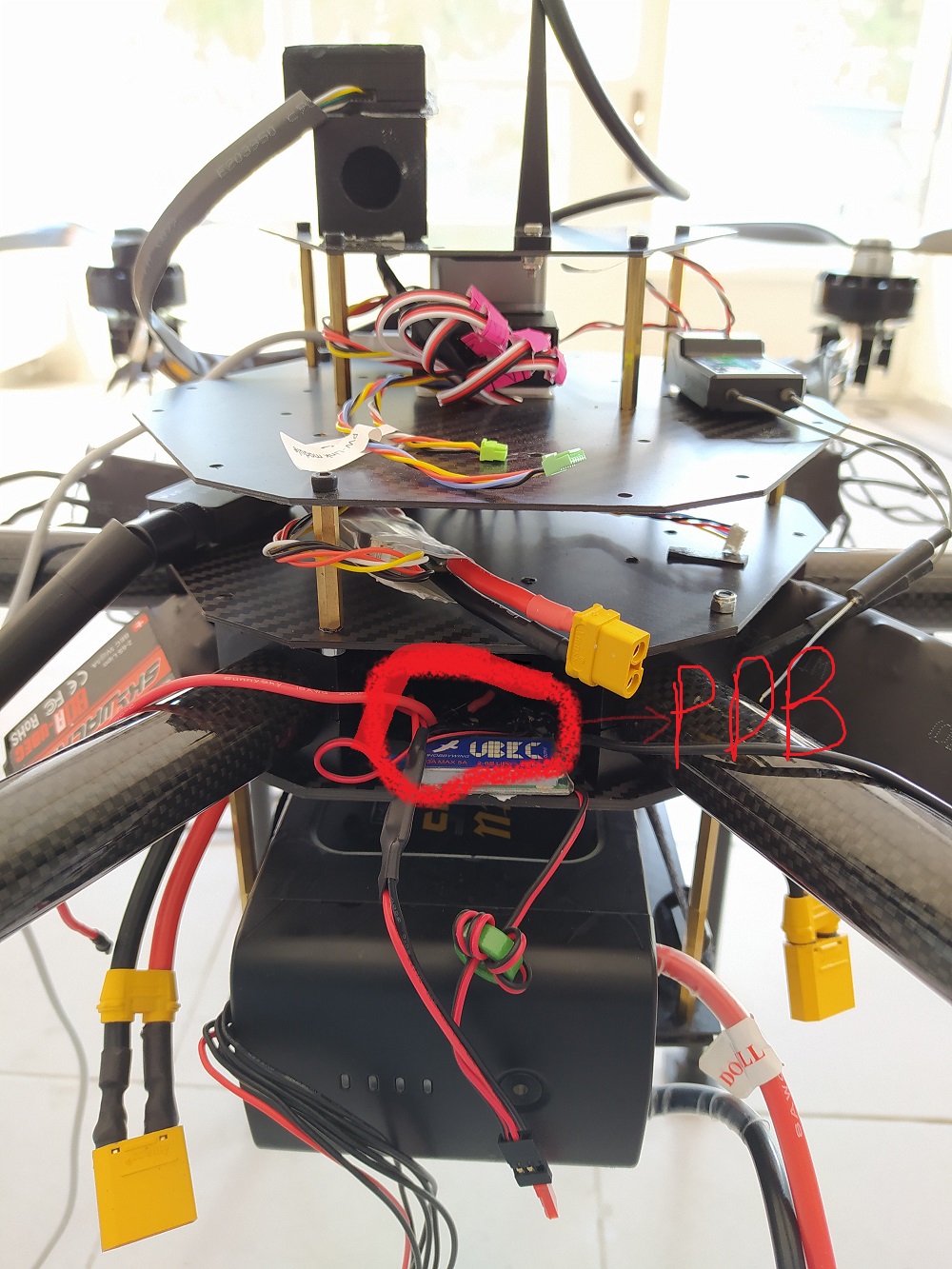
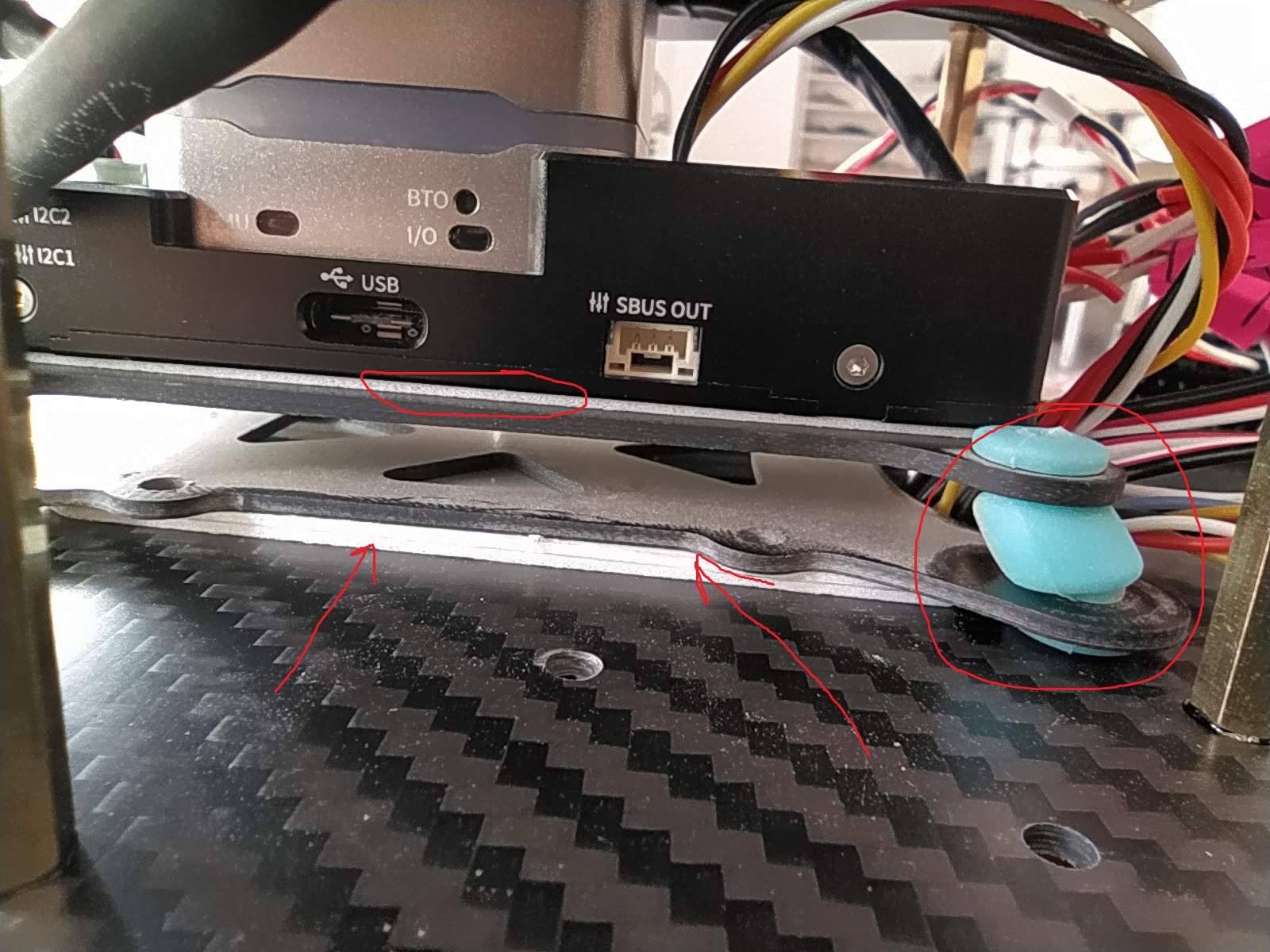
I am making Hexacopter with CuAV V5 +. Radar will be installed underneath.
1-) I made a design considering Magnetic Interference. The pollution of the engine / compass calibration on the ground is minimal. It goes beyond the limits when it takes off. Is this normal? I canceled the internal compass. I think it’s resolved for now.
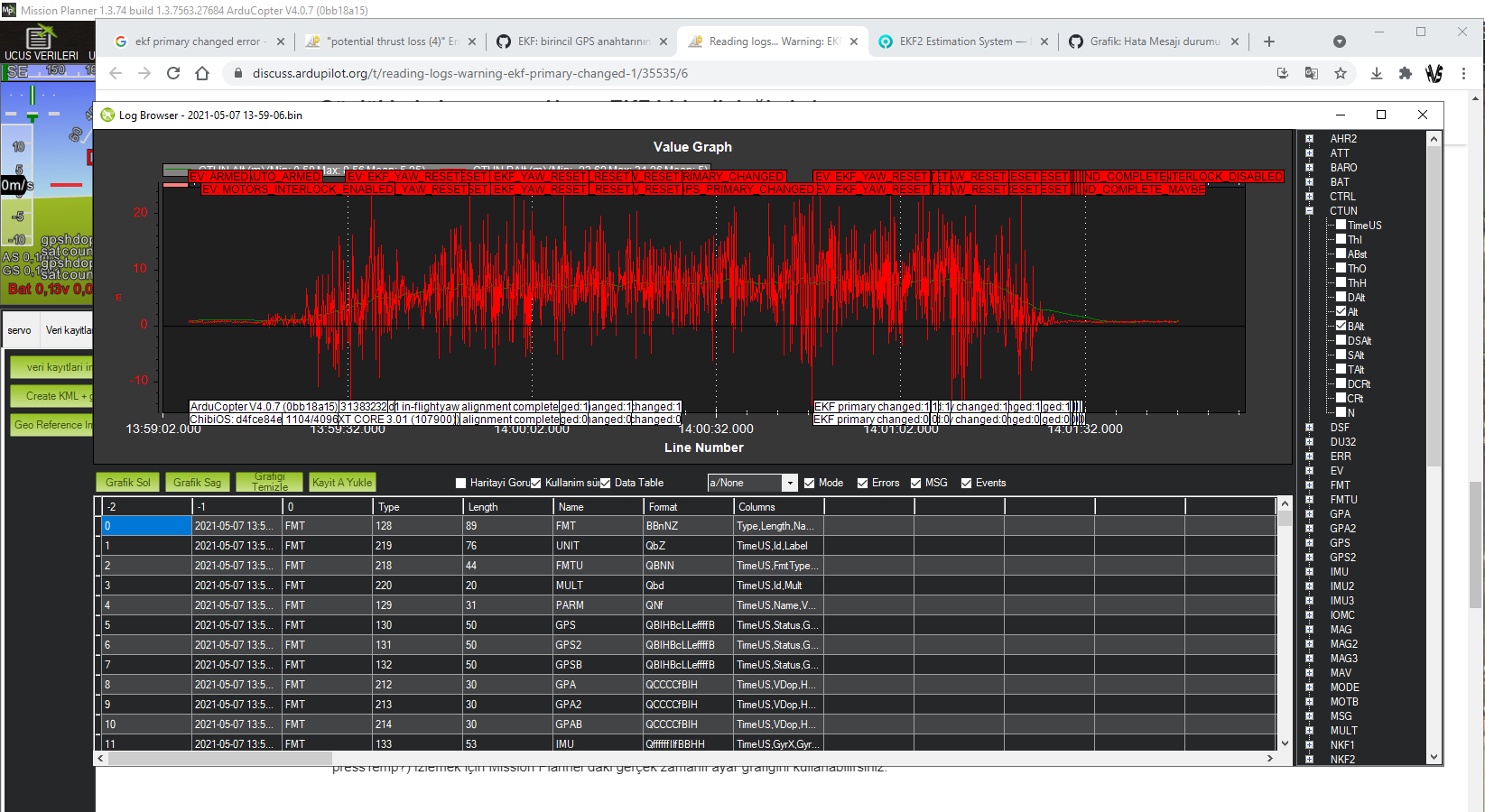
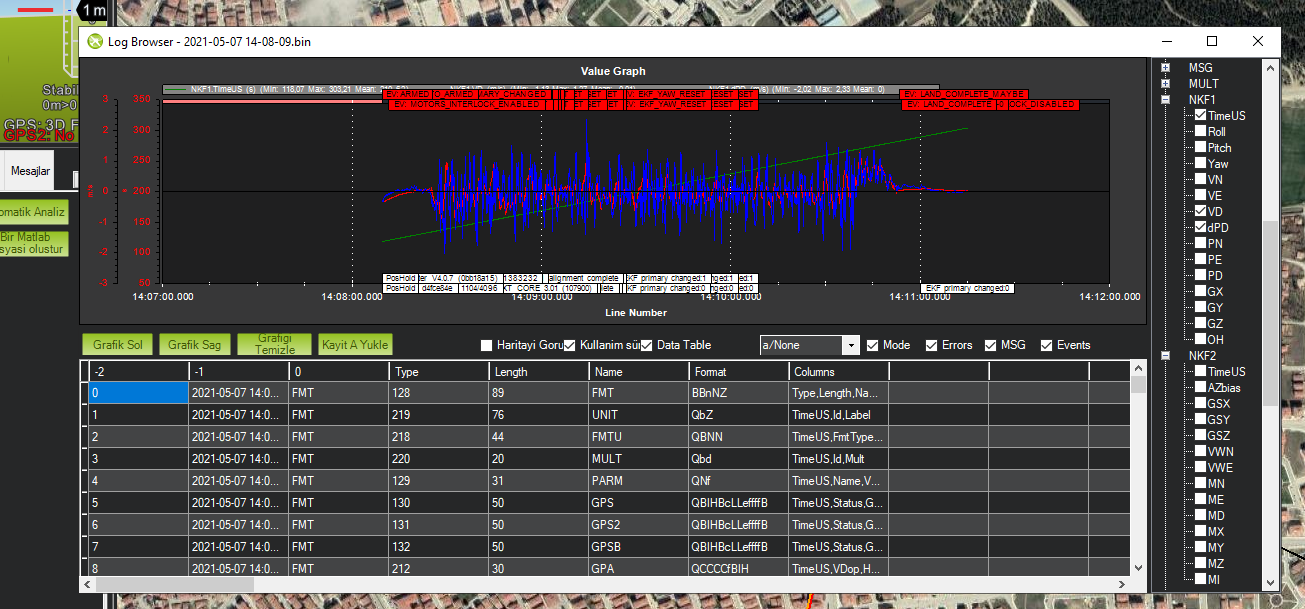
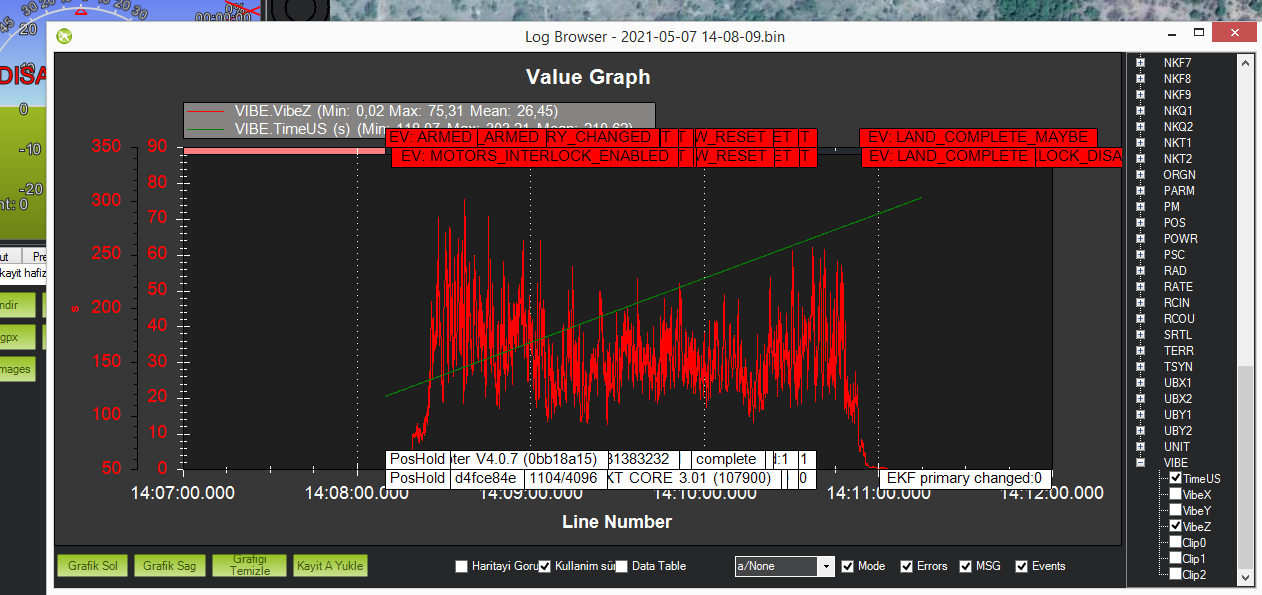
2-) The instrument cannot maintain its altitude in PosHold-Loiter mode. It oscillates up and down. It can remain stable horizontally. I suspect the barometer. Continuous EFK_ Primary_Changed error. Vibe_z vibration level is also rising.
I would be glad if you could tell me what the problem is. I seriously suspect the barometer!
Thank you in advance for your answers.
.
bin LOG Save
.