Sorry for creating topics back to back.
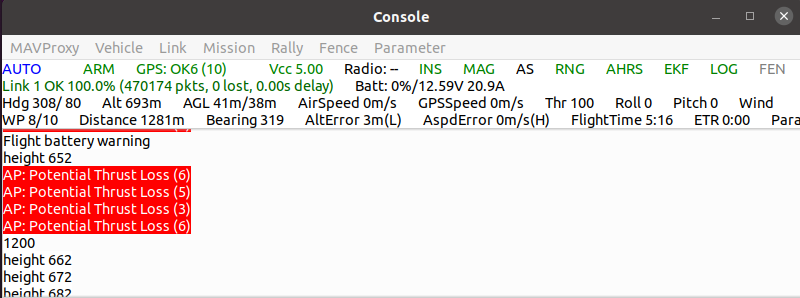
While I test the terrain following with y6 frame, the drone keeps crashing on the terrain.
Could you help me to resolve this issue?
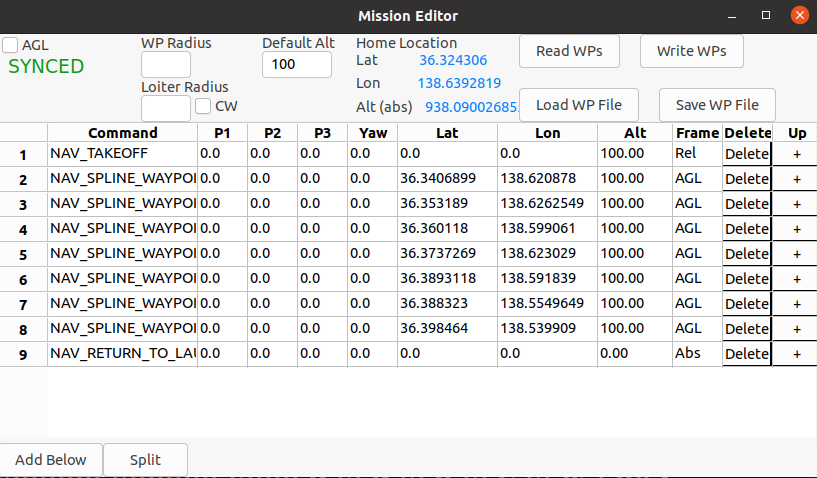
I run the mission below on SITL, and you can probably reproduce the issue as following steps:
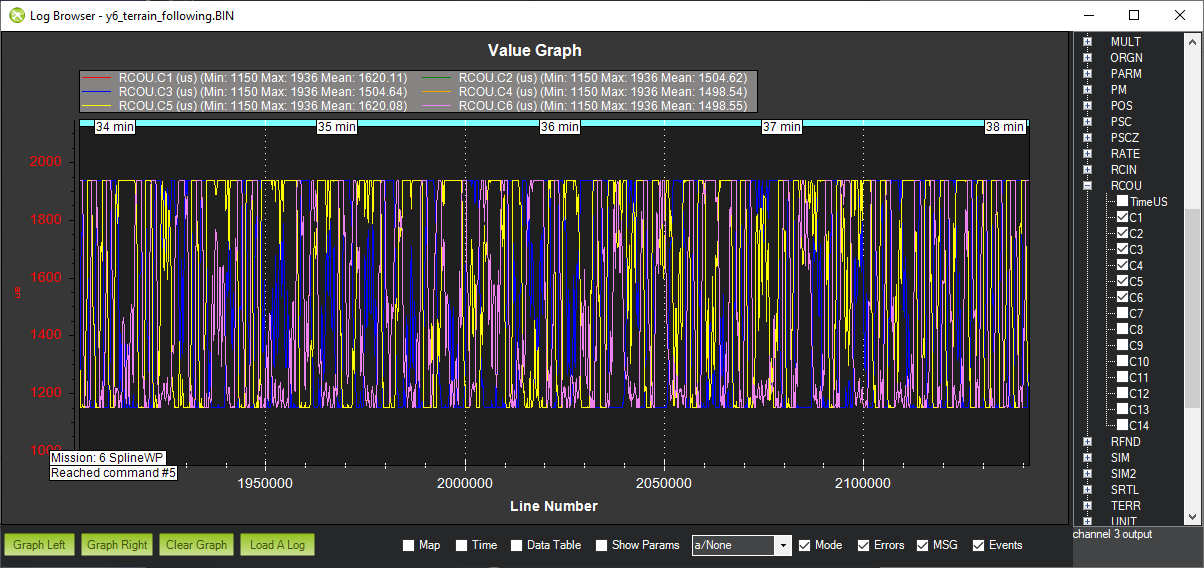
Thanks for the report. I ran the mission provided with a quadcopter (in SITL) and it flew fine so I think this could be purely a simulator issue caused by changes to the virtual Y6 which has led to an extremely poor tune of the vehicle. Below is a graph of the RCOU message and we see the outputs are bouncing up and down.
We’ve seen this problem on other SITL vehicles but I thought I had corrected all the various vehicle’s tuning… apparently not so I’ll have another look.