Shake on Z-axis like crazy
thought it was dueto low rotor speed, increased by 30%, shaking become more severe. Eventually,the battery got lose and droped on the ground, My heli crashed. Pls help me. I will upload my log and params from last flight.
No, do not mess with those PSC settings. That is not the problem. Having the battery fall off the aircraft is never good. It not only upsets the weight and balance of the machine, it tends to make the motor quit which puts the helicopter into unpowered flight envelope.
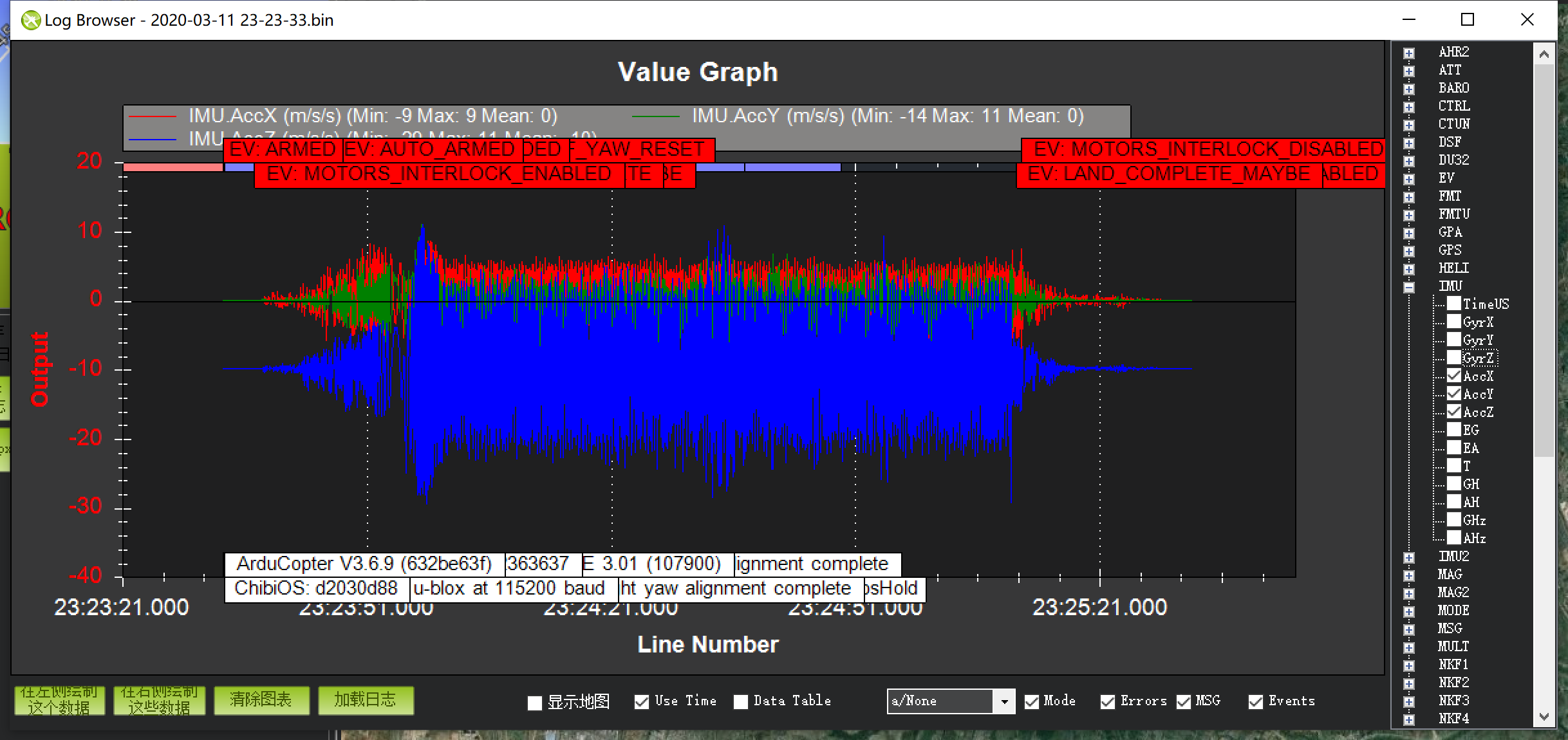
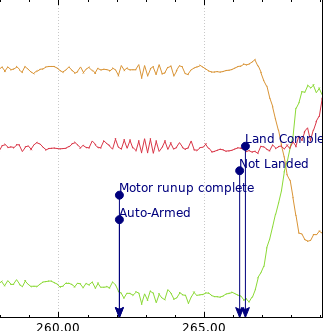
I do not see any clipping of the IMU’s until the battery fell out. I would look at mechanical issues like blade tracking and balance. Your y-axis vibration is much higher than normal, which would indicate a balance or tracking problem in the rotor system.
Take a look especially at blade tracking. I can see it shaking badly in the roll axis during runup, still on the ground, and the servos/attitude controller is reacting to this.
To be on the safe side also set the D-gain in the roll to zero. This setting here. You do not need that until you get a handle on what is making it shake, and even that little bit of D-gain could make it worse until you find the issue.
ATC_RAT_RLL_D,0.0005
Thanks,
I’m a green hand at this. Your youtube video got me through the setting up. Really appreciate it. Imma gonna check my rotor systems.
P.S. It will be really great if you can make a video about how to understand and use these logs
You aren’t, by any chance, running up with a lot of negative pitch are you? That is never good if you are doing that. Make sure the rotor is at feather pitch, blades flat, when running up.
The reason I wonder it is because that shaking sort of evens out as you pull pitch. Which could mean the helicopter is reacting against the landing gear on the ground with the rotor system moving air and trying to force it into the landing gear. Having that happen on the ground can shake stuff loose in short order on helicopters. Sometimes it can cause the landing gear to go into such a severe reaction that it can destroy the helicopter. Always make sure that pitch is at feather when running up.
Oh MY GOD!!! You are unbelievable… how do you know that? Yes I did, I was so stupid! I thought this would improve the shaking before take off. and you know what? I broke a landing skid, Before I actually got it airborne for the first time .
Because I just do. I’ve taught plenty of students before.
Another thing I notice is that you are running up in Pos Hold. I don’t recommend this. You don’t have control of the collective pitch. And the helicopter is trying to self-level. Even Stabilize can be a problem if you run up on an unlevel surface as it adds an unwanted cyclic pitch to the rotor system, which causes severe vibration on the ground.
For getting started, I would recommend using Stabilize for runup instead. Make sure the helicopter is on a level surface, preferably something soft like grass or dirt - don’t take off from tarmac or concrete surface. The Stabilize will help you learn how to fly it in hover and will give you control of the collective pitch until you get a handle on it and get it tracking and balanced.
Since it was not clipping until the battery fell out practice getting it into the air cleanly first, and learn how to hover it tail-in. Once you get it so you can hover it, have an assistant look at the edge of the rotor disc in hover. It should define a knife-edge path as it turns. If it looks “fuzzy” like one blade is tracking high or low, then mark a pitch control arm with a marker. Adjust the pitch link on that arm one way or the other until you get a nice sharp rotor disc in hover. This is not a one-shot deal, I’ve spent hours before tracking a rotor until I get it on-the-nuts perfect. Especially on scale models with 4 or 5 blade heads where you have to do them one at a time.
What do I do ? I set IM_STAB_COL to 600 which means 5.0 degrees collective pitch(My hovering pitch) at mid collective input,like you said on the video . but when I use POShold mode for take off. the collective seems unresponsive to my collective input, not untill the rotor revs up to the setpoint.
No, I am not an arducopter coach. But we do have a school for commercial pilots. If you are in Wisconsin or Minnesota USA contact me on PM and I will give you the details.