I need some help to analyse the logfile from my Arducopter, after a nice take off I switched over to Loiter and my drone suddenly falls down from 25 meters altitude.
One of the arms was broken and the motor was blocket by one of the magnets inside the motor.
Might the magnet be the cause for the crash or reason for the crash ?
I had before the crash changet the propellers from 9X45 to10X45. I had much lower vibration levels with the smaller props,
You have right, the broken motor is an result of the crash and high wibrations might be the cause for the crash,
My drone had total flight time approx 1,5 hour with 9X45 props without any issues
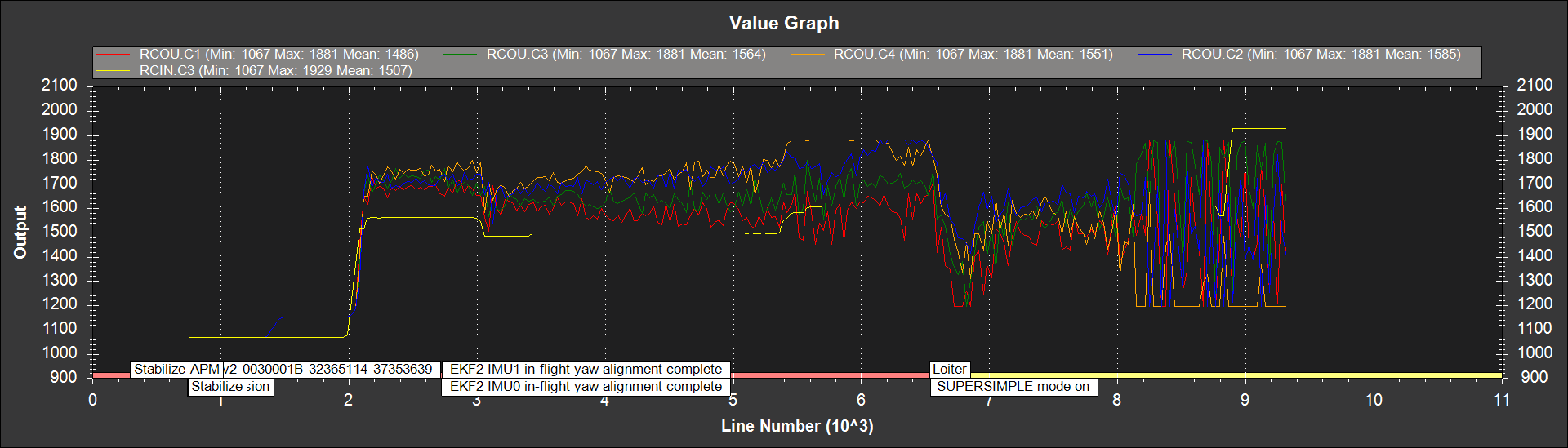
The vibrations were fine.You had a failure of number 4 motor and from that point on you were a passenger.
Motor 4 was operating at near full power through stabilize mode and reduced on selecting loiter mode.Shortly after it lost drive for some reason.Chief suspects are an ESC failure,an ESC de-sync (looks a bit that way to me),a dodgy connection especially a bullet connector (high probability),or a broken and moving wire in the motor.As there was no variation in the throttle input it’s a hardware fault not limited to those above.I’m always finding new and exciting ways to screw up.
{kind=link}