Hey All,
So I pulled a quad off the shelf that hasnt been used for a couple of years, had AC3.5 on an old pixhawk clone fmuv2 (Pictured Below). I updated firmware to 4.0.3. Changed a few settings and did a quick radio, compass, ESC and accel cals. Everything was looking good. Took off in ALT Hold (Should of been STAB I know) and the aircraft was holding height well and position (little to no no wind). I did some quick user input and every thing seemed ok, then all of a sudden a huge roll and yaw to the right (i think, it was quick) and throttle down? as it spiralled into the ground.
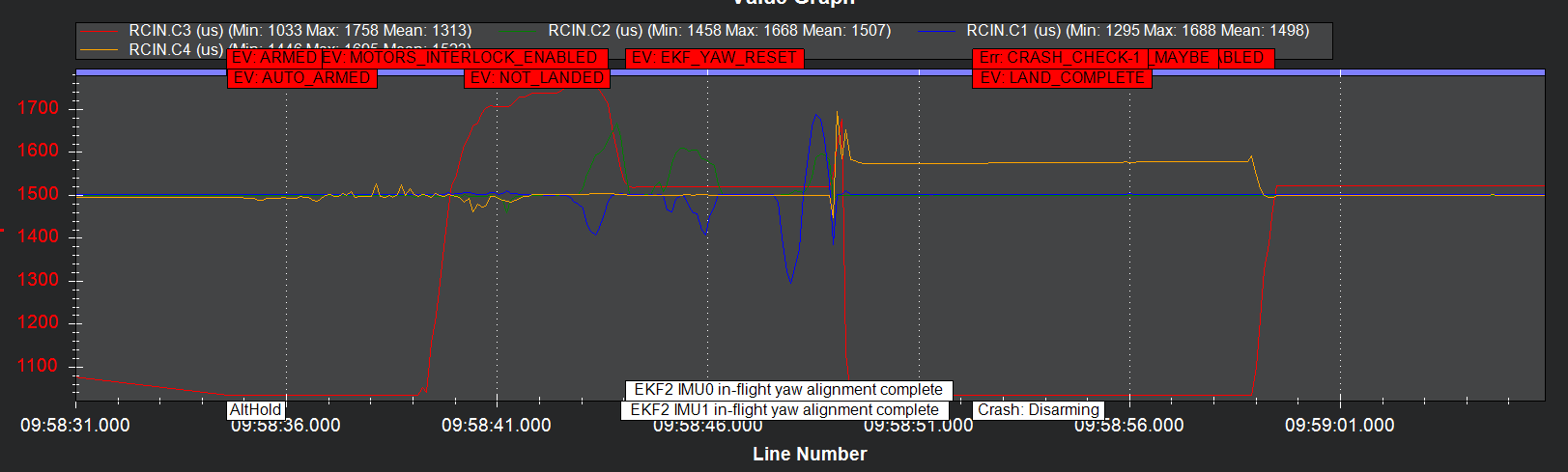
Im still learning to analyse the BIN logs but from what I can see the RC input wasnt a problem (picture 2). Looking at the servo out to the motors (picture 3) you can see that the 9:58:48 mark servo 4 went max and servo 3 went close to min.
All motor directions and position are correct, props are fine, motors are spinning freely, GPS and Compass seems ok (its a new one).
If anyone can help me get to the bottom of this that would be appreciated. Ive attached to the BIN log for you to have a squiz at.
Thanks.
https://drive.google.com/file/d/1Lz8r1R5svF-btRJh-psvc7ZwKPP37hdS/view?usp=sharing

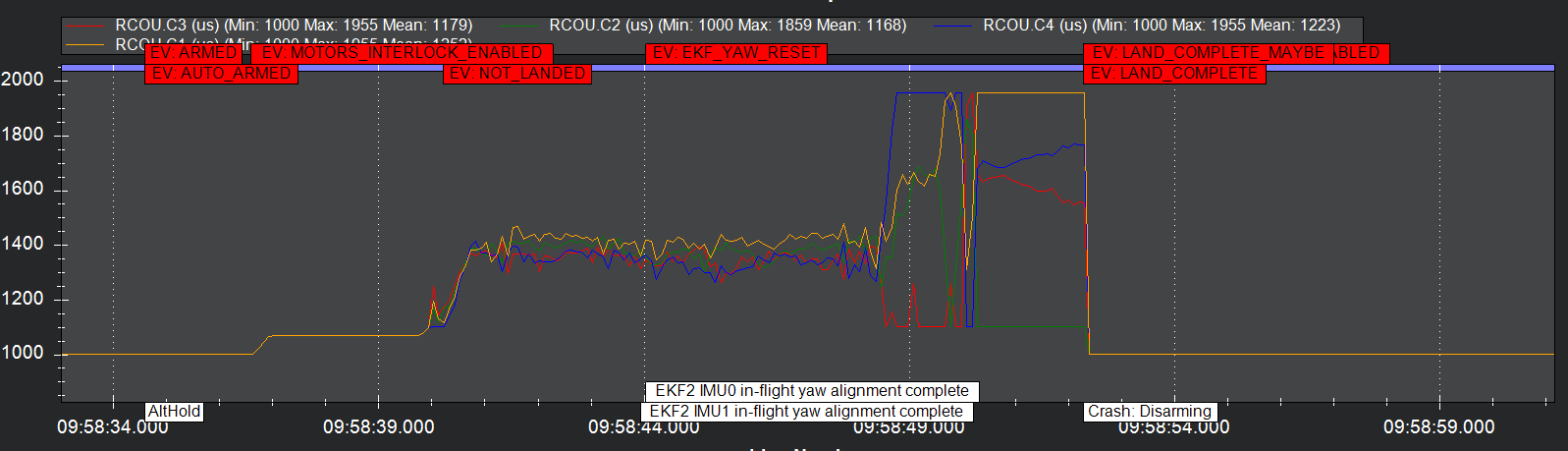
I haven’t looked at your log, but based on the picture I’d suggest ESC/Motor 4 failure.
And update to ArduCopter 4.0.7 ASAP