I have been developing a large quadcopter over the last few months. It has been flying great with no issues through the preliminary test flights. I attached my Gremsy S1 gimbal with my camera (about 1.2kg payload) and the drone became very unstable and ultimately crashed.
7208-135 motors
24.5" props
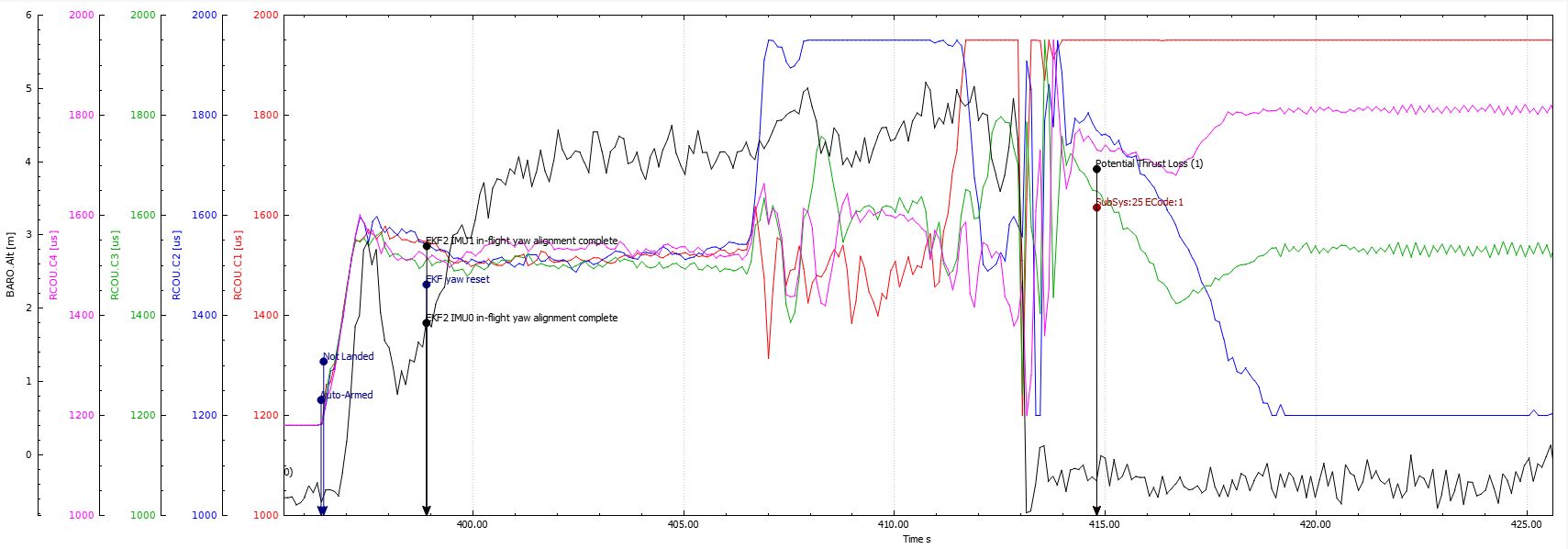
It seems that the magnetometers went crazy once a thrust command was given. With a dummy payload this didn’t happen. Only when the gimbal was powered. I ran through the calibrations as normal but without the gimbal powered (maybe this is the cause?)
This is my first time flying with a large gimbal, but everything is perfectly balanced. Has anyone had this happen to them?2021-01-05 10-09-00.bin (712 KB)
Underpowered copters do not fly properly. You need to do tests before adding 1,2Kg!!!
Add dummy weight, test that the hover thrust is still bellow 60%, re-tune the copter, and in the very end add the expensive Gremsy and the expensive camera. Did you do it like this? Looks like yes.
Electrically does your BECs provide enough current? Are your wires as short as possible? Are they thick enough for the current that they carry? Are the wires close to the magnetometers?
Which ESC protocol would you recommend? I’ve normally had good luck with DShot1200… but this is by far the largest craft I have built. is DShot too fast causing overcorrections?
Dshot150. You won’t realize any advantage with a faster protocol with a craft that size anyway. As you don’t seem to be using ESC telemetry standard PWM would be fine.
I would change that and then hit Alt>A in Mission Planner, enter the data as prompted and make those changes except for INS_GYRO_FILTER… Leave that at default (20Hz). The you should really perform the process’s necessary to set the notch filter and after that run Auto Tune. It’s all in the Wiki.