After several month doing nothing I did a test hover yesterday. Because of a crash last year the Hexacoter - FC=CUAV-V5 nano - total weight 5.4kg, has 6 new motors. A bit windy but everything went well in a very small area in my back yard. Used all old param. but latest FW
I always run and watch the .tlog file in Mission Planner after testing. I noticed the word CPU blinking every few seconds, where the GPS fix message can be read in the HUD.
In all my flying over many years I have never seen that message coming up ever.
This FC has been very reliable and done many missions.
I cannot find an answer here and I wonder how dangerous that might be?
logfile: Dropbox - 2023-01-29 14-10-23.bin - Simplify your life
Did you see these messages in the log?
Any idea why you have this set to 2?
GPS_RAW_DATA,2 (Default is 0)
How did you “use the old parameters” with the latest firmware?
Thanks for the reply.
The message GPS2 failing configuration checks came up only after the hover test. When the drone disarmed after flying that message came up. No bad preArm messages at all before take-off.
With old param I mean I just upgraded the FW until the latest FW I used for the hover test. Never touched the param.
I can’t remember why I ever used GPS_RAW_DATA, 2. Will change it back to, 0.
Dave, any idea why the ‘CPU’ word comes up?
My .tlog file would show exactly what I have described above.
There are some spikes in CPU load, PM.Load, but it doesnt look critical at all. PM.NLon (number of long loops) is consistent and not shooting through the roof, so all OK I think.
Some issues we see are because of improved reporting and messages, rather than a new problem. So it could have been an existing issue, but now there is better reporting. There’s no doubt new features can add load though.
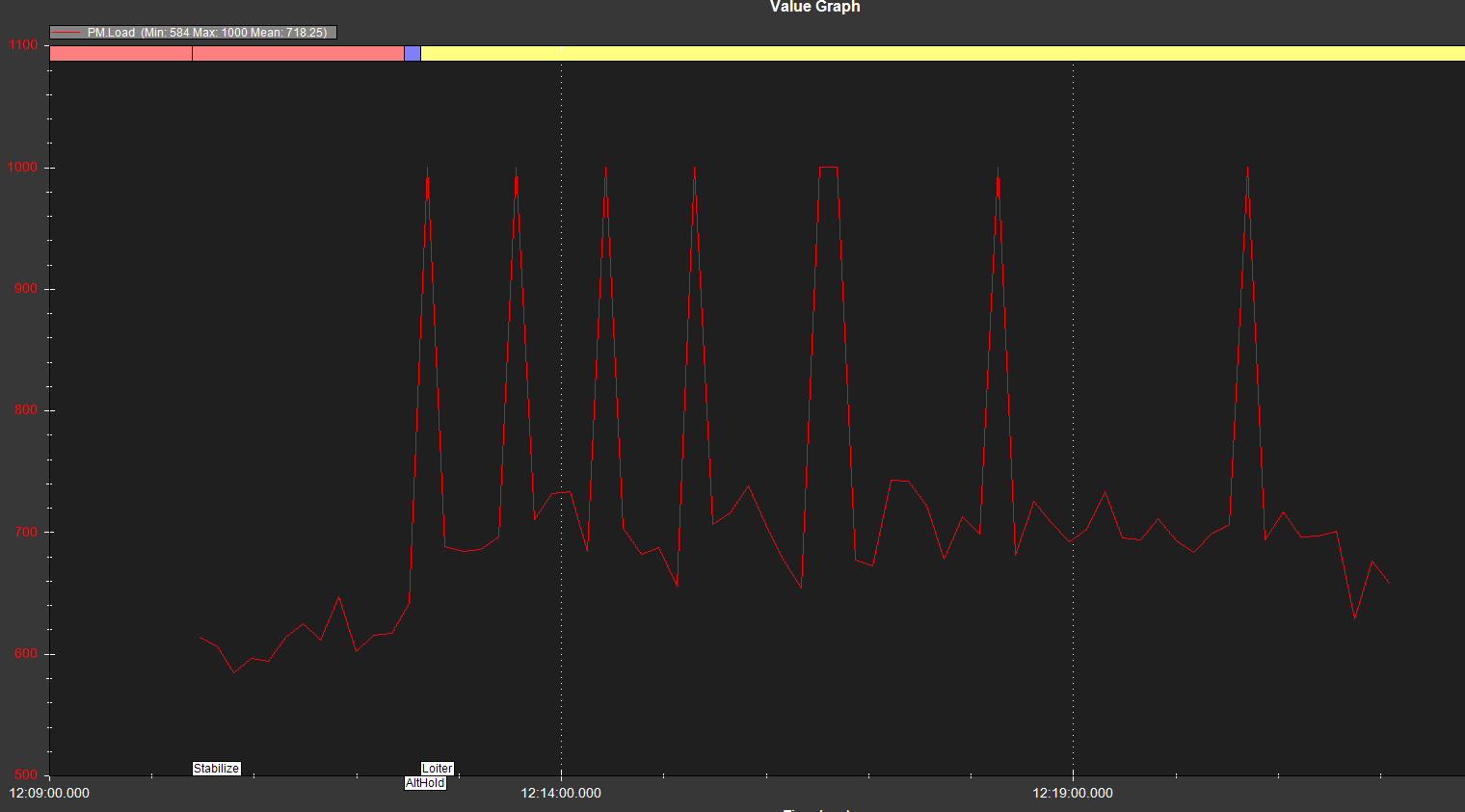
At first glance I couldnt see what’s causing it.
Maybe minimise the load by unsetting Fast IMU logging
LOG_BITMASK,176126
and HNOTCH logging
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
In other news
You can safely set
INS_ACCEL_FILTER,10
and you can alter your HNOTCH settings
INS_HNTCH_REF,0.27
INS_HNTCH_FREQ,60
INS_HNTCH_BW,30
INS_HNTCH_FM_RAT,0.7
PSC_ACCZ_P,0.4
PSC_ACCZ_I,0.8
Thanks for looking into my .bin file. I have a piece of mind now. Your suggestions will be used and I am sure I will have a great video drone again.
Just to let drone flyers know how my crash happened.
I was flying for about 15 minutes (mission) and the copter came back for landing. Watching the drone come down suddenly the motors stopped just 15 metres away from me. The power plug from the drone had melted solder and had separated. Another person at the crash site found it and picked it up. But he had very burned fingers. I use XT90 plugs now and they not get even warm. XT60 is just not good enough in my case. I am sure it was a faulty, worn solder point because it worked for 2 years. But checking the plugs is now one of my priorities before flying.
With any of the battery connectors like XT60, XT90 , even 150’s - you have to periodically check and tighten the four little prongs that make up each center pin. Get a very small flat blade screw driver and push it in just a bit to spread the prongs (just enough to be tight in the other other connector).
In your log there is 50amps continuous - that is excessive for an XT60.
1 Like