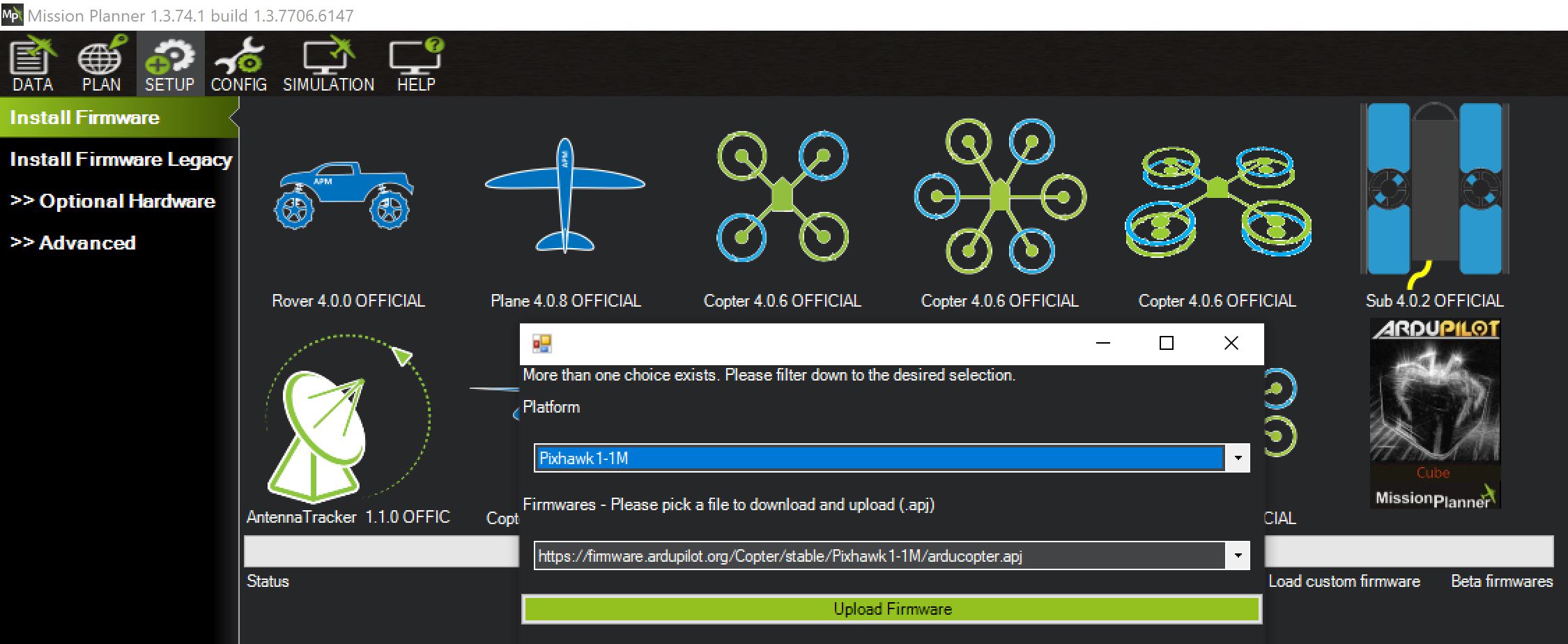
My Quadcopter: Pixhawk Clone (<1M mem), Plastic Frame, APC props., v4.0.6 copter (legacy), MP v1.3.74
.bin file: https://drive.google.com/drive/folders/1oJu4VgNgmyL_zD6jq1j20pBN_rVmGqK6
Since my last submittal I have addressed: Z axis Vib., motor alignment, and corrected the large differences in motor speeds. But I now have some additional issues that I do not understand.
I would appreciate it if someone could take a look at my .bin file and help me understand what is going on.
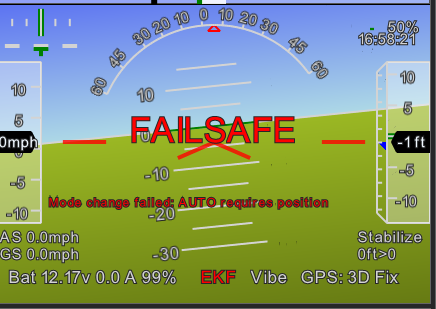
For this flight test I was testing Auto Mode in a more confined flying area. The problems I encountered were in the time frame of: 16:58:06 through 16:58:41:
- EKF primary change to 1?
- Failsafe (I am not clear what Failsafe was triggered) 16:58:10
- Mode change failed, message: “mode change failed: Loiter requires position” 16:58:18
- Mode change failed, message: “Auto requires position” 16:58:21
- Then at 16:58:25 “EFK2 IMU0 is using GPS”
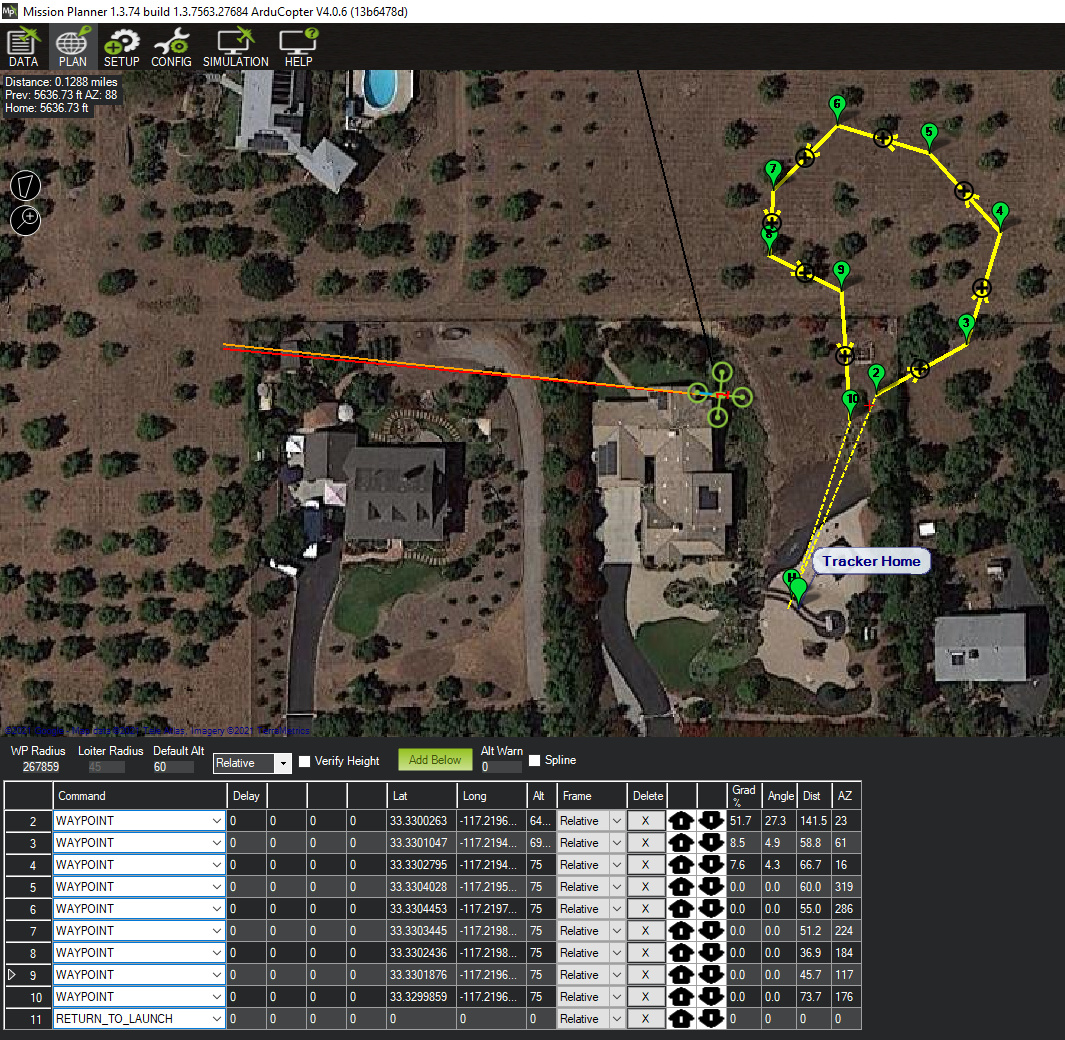
- At 16:58:42 the mission “Takeoff” was executed, the quad. successfully flew the 10 waypoint mission and auto landed.
The quadcopter had been sitting for several minutes and I thought it had fully acquired the GPS sats. But from the log files it looks like there was some issue with GPS (or other issue) that created the “requires position” error message. GPS had 14 sats at the 16:58:10 time frame and through approx. 16:59:35 when sats jumped to 18. So this does not explain #3 and #4 above??
Also, the Failsafe (#2 above) at time 16:58:10, I do not understand this at all?