An ArduPilot user in the Middle East asked me what’s the proper way to set parameters so that the aircraft will continue on AUTO if the RC connection fails.
This is one of the first things I had to investigate when I began using ArduPilot. It was good to revisit this - as I’m not 100% sure I understand the proper combinations of FS_THR_ENABLE and FS_OPTIONS that are now required since Copter 4.0.
My requirement may be common - so I’d like to use it as an example:
When flying in AUTO - continue the mission.
When not flying in AUTO - RTL
The way I understand the doc, this can be accomplished with the following combined parameter setting:
FS_THR_ENABLE=1
FS_OPTIONS=0 (nothing selected on the bitmask)
If I’ve understood the docs properly, this combination of settings will cause the copter to RTL when flying in manual flight modes, and continue when flying in AUTO.
If I’ve mis-understood how these options work together, I’d appreciation knowing what I have to set to achieve my requirements above - in particular, if I have to change parameter settings to achieve this when switching from flying in AUTO and some other mode.
One last thing - I noticed that PLANE has an entirely different set of parameters for Advanced Failsafe. I’d be curious to know if the setup would have to be different for VTOL airplanes flying ArduPlane.
Maybe you don’t realize how disrespectful your comment is. (Or worse, maybe you do.)
To say “The FS_OPTIONS parameters definitions is fairly self-explanatory” implies I’m incapable of understanding it, or didn’t make the effort.
You’ve said that the options I understood would continue the mission when in AUTO mode, and RTL when not in AUTO will not work - you stated they will RTL anytime.
What you did not say is if there are settings that can do what I’m wanting - and if so, how.
I appreciate you taking the time to respond to my queries. However if you can’t respond in a helpful and respectful way, I would prefer you allow others to respond instead.
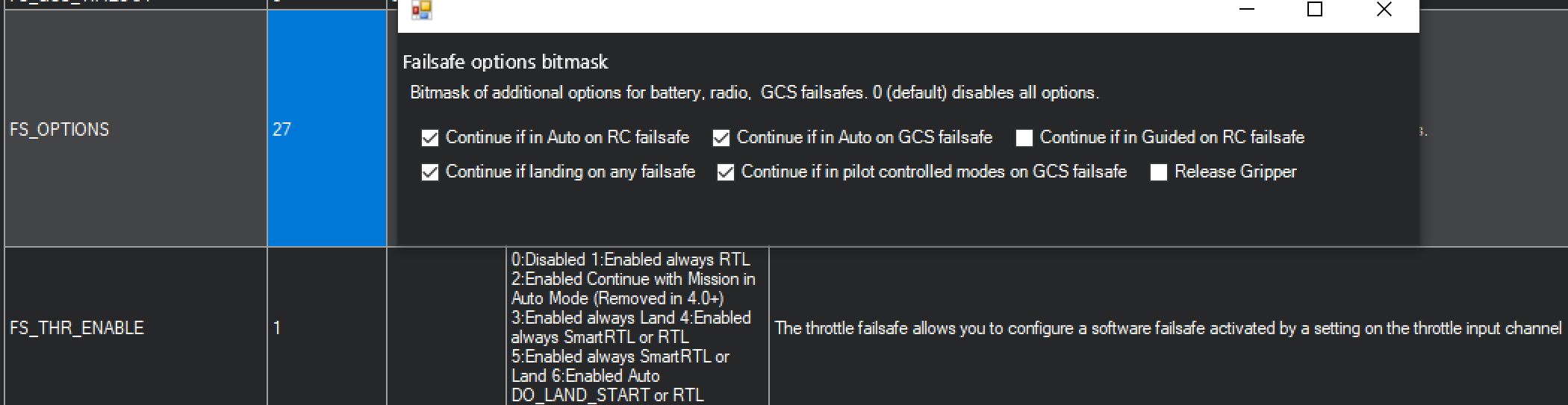
FS_OPTIONS are a bit mask, so to set the 0 bit (“Continue if in Auto on RC failsafe”) then you need to set it to 1. If you use the drop down menu in @dkemxr 's photo then you can just check the boxes without having to do any bit-mask math. Leaving it at 0 will disable all the FS_OPTIONS and the plane will RTL anytime, even during a landing event.
Disrespectful for giving a simple and concise answer? No, I don’t think so. I corrected your mistake and provided reference material relative to the question. When the function of the bitmask selections are clearly stated in the parameters description what else is there to know?
Thank you Allister - yes, I know how bit masks work. I’ll admit that every once and a while I get the “value” and the “settings” mixed up in conversation. I suppose if I worked with “bits” every day, I wouldn’t make such mistakes. Until I took up ArduPilot, I hadn’t worked with bitmasks since I did assembly language coding on IBM mainframes - many, many decades ago.
FS_THR_ENABLE and FS_OPTIONS work together on copter. (plane has the AFS… parameters to content with) I doubt I’m the only one who want’s to make sure I have the settings set correctly. It’s not an easy thing to test - and mistakes could be costly.
My goal is to use these setting so that when flying on AUTO, the copter continues the mission when the RC link is lost - and when not flying on AUTO, to RTL.
I’m not 100% sure that there is a combination that accomplishes that - or if I have to change these parameters according to which type of flying is done.
I’d appreciate any light you can shed on the matter - thank you.
FS_THR_ENABLE, 4. This will give you RTL (or SmartRTL if available) in the event of a radio failsafe. (If you don’t like/want smartRTL then set it to 1)
FS_OPTIONS,1 . If you’re in auto mode, and you have a radio failsafe the quad should continue on it’s mission, however in any other mode it will act according to the FS_THR_ENABLE setting (RTL).
What this does not account for is if you have a GCS setup. If you’re using a GCS then you may want to expand on the FS_OPTIONS because right now, with the setup I’ve described, the quad will RTL on a radio failsafe (unless in auto mode) even if you have a solid GCS connection.