Hi,
Today I went out to maiden a hexacopter. I followed Arducopter’s docs regarding first flights.
Flying in STABILIZE mode was OK.
While flying in ALT_HOLD mode with my throttle in the middle (PWM ~1500), I noticed my copter suddenly beeping and ascending quickly.
In a later flight, while flying in ALT_HOLD mode and intentionally descending, I noticed my copter suddenly beeping and descending quickly.
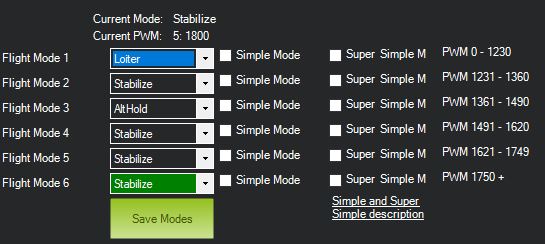
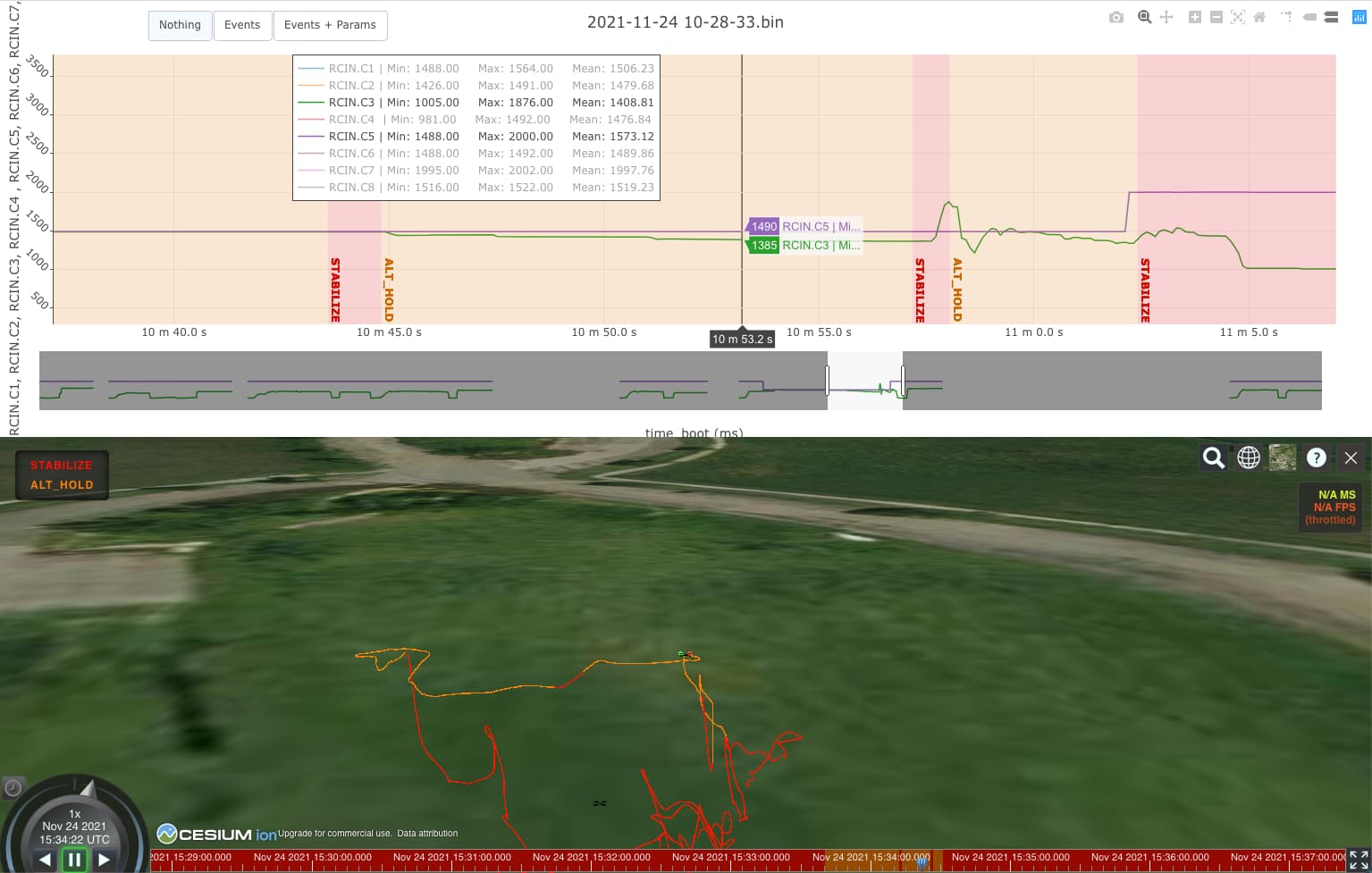
My thought was that the copter was suddenly changing to STABILIZE mode for brief lapses, without me changing anything in my GCS and without flipping any switches on the transmitter. The logs also suggest this.
Screen Shot 2021-11-24 at 11.49.07 AM|690x439
I thought my RC transmitter could be sending the wrong PWM’s for my flight mode switch, but the logs do not suggest this.
What could be causing my copter to suddenly change to STABILIZE mode for brief lapses?
My setup is:
Cube Orange - Ardupilot 4.0.6
Tarot X6 hexacopter
T-Motor MN505s
T-Motor 18" props
Radiomaster TX16S + RFD900 TXMod for RC and telemetry
Mission Planner GCS connected to TXMod’s TCP
Raspberry Pi Companion Computer
AUW: ~7kg
Here’s a link to my .bin log: Dropbox - 2021-11-24 10-28-33.bin - Simplify your life
Remember this flight happened before any tuning or autotuning.
Thanks in advance!

{kind=link}