Hi Everyone. I am running copter 3.6 on an quad I built nearly 2 years ago.
2 months ago while running autotune the copter flew into a tree after the compass stand came apart inflight.
I replaced the compass, did a compass calibration all looked good until I armed the copter and slowly raised the throttle (gains were re-set to previous parameters)
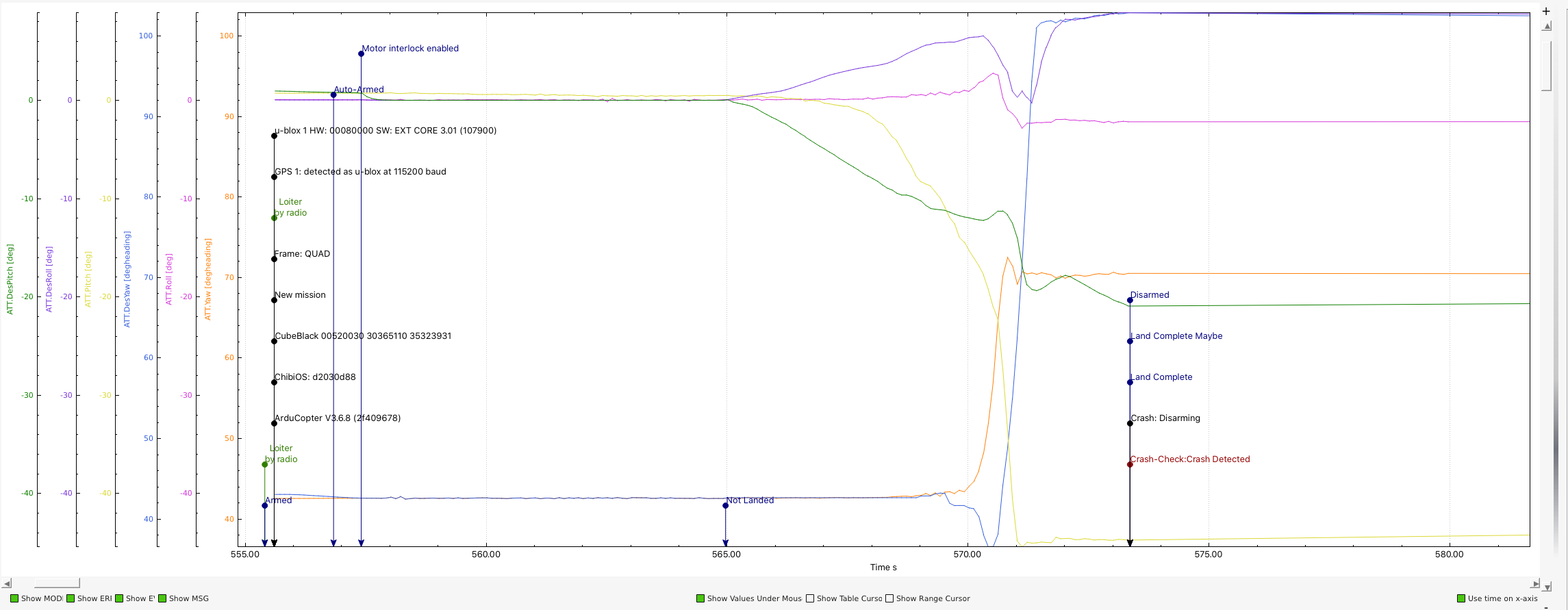
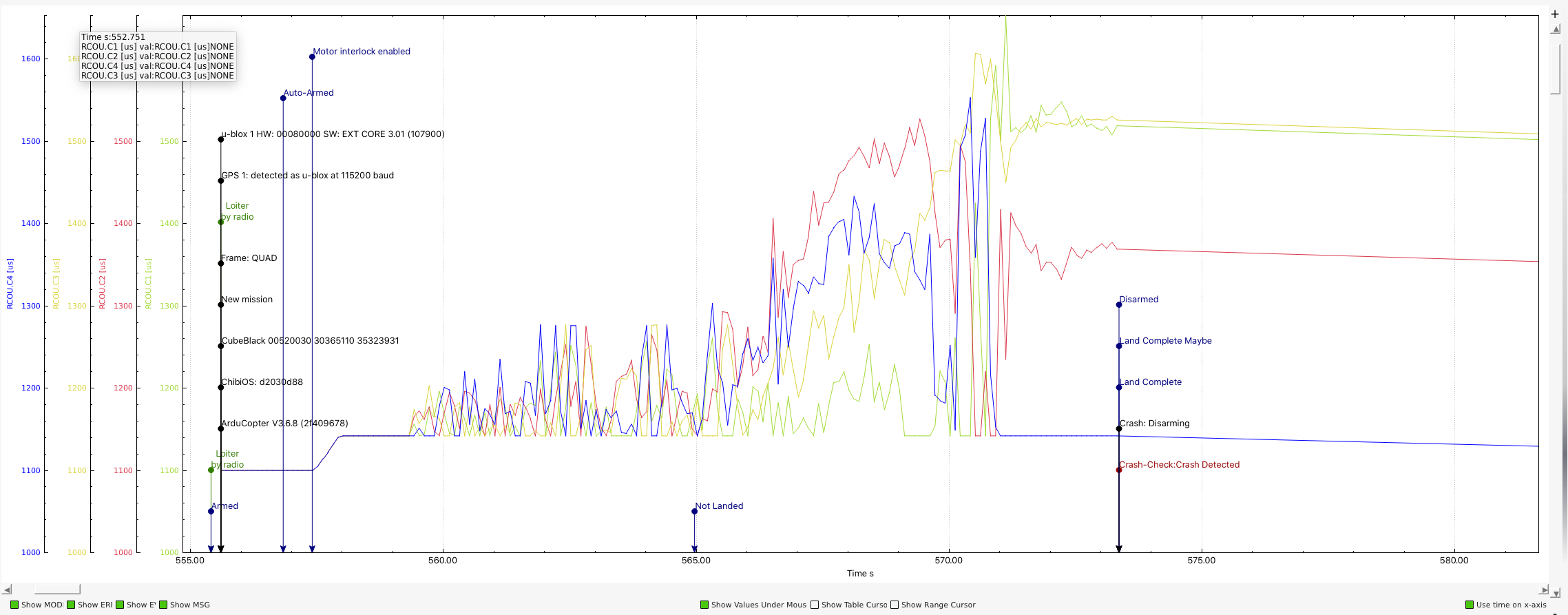
on raising the throttle the only the back of the drone elevated (all motors were spinning)… I disarmed immediately as the front props hit the grass…
I I then tried a second time and this time the front lifted up until the back hit the grass… the front props continued to spin even as I tried to disarm with the controller until the drone sensed a crash and powered off…
Im attaching the log… any help is appreciated… log file “bin”
Thank you Mike
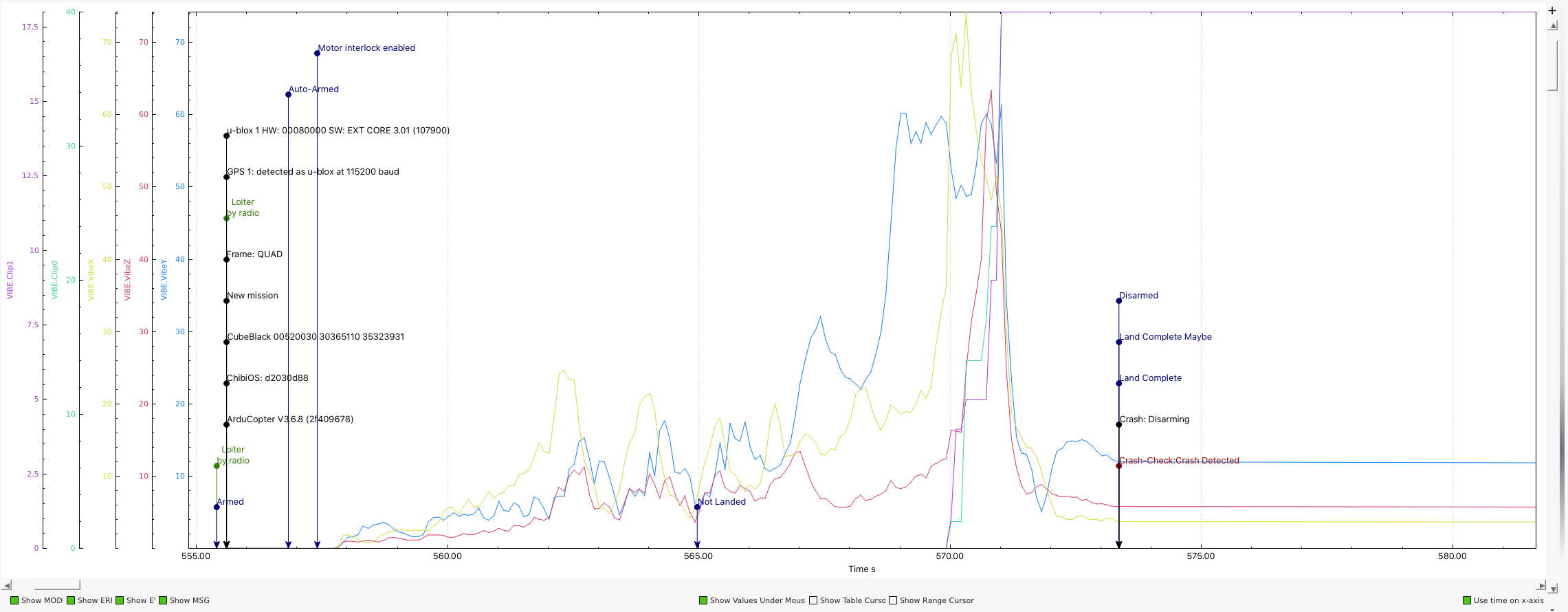
I ran a motor test - all appear in the correct order for x quad… all spin directions were ok… Keep in mind I had been flying this for nearly 2 years, until the autotuned crash 2 months ago… the vibration could be a motor mount out of alignment, though I thought I checked… could faulty speed controller be the blame or is it filght controller related (perhaps from the crash) pix 2.1
After reviewing all settings and running a motor tes verifying the motor direction, all is functioning correctly. props are attached in the correct direction and the frame type is also verified X-8.
\Given the log results mike presented, does this indicate an issue with the pixhawk or could there be an issue with the esc’s?