Exactly, that was it!!
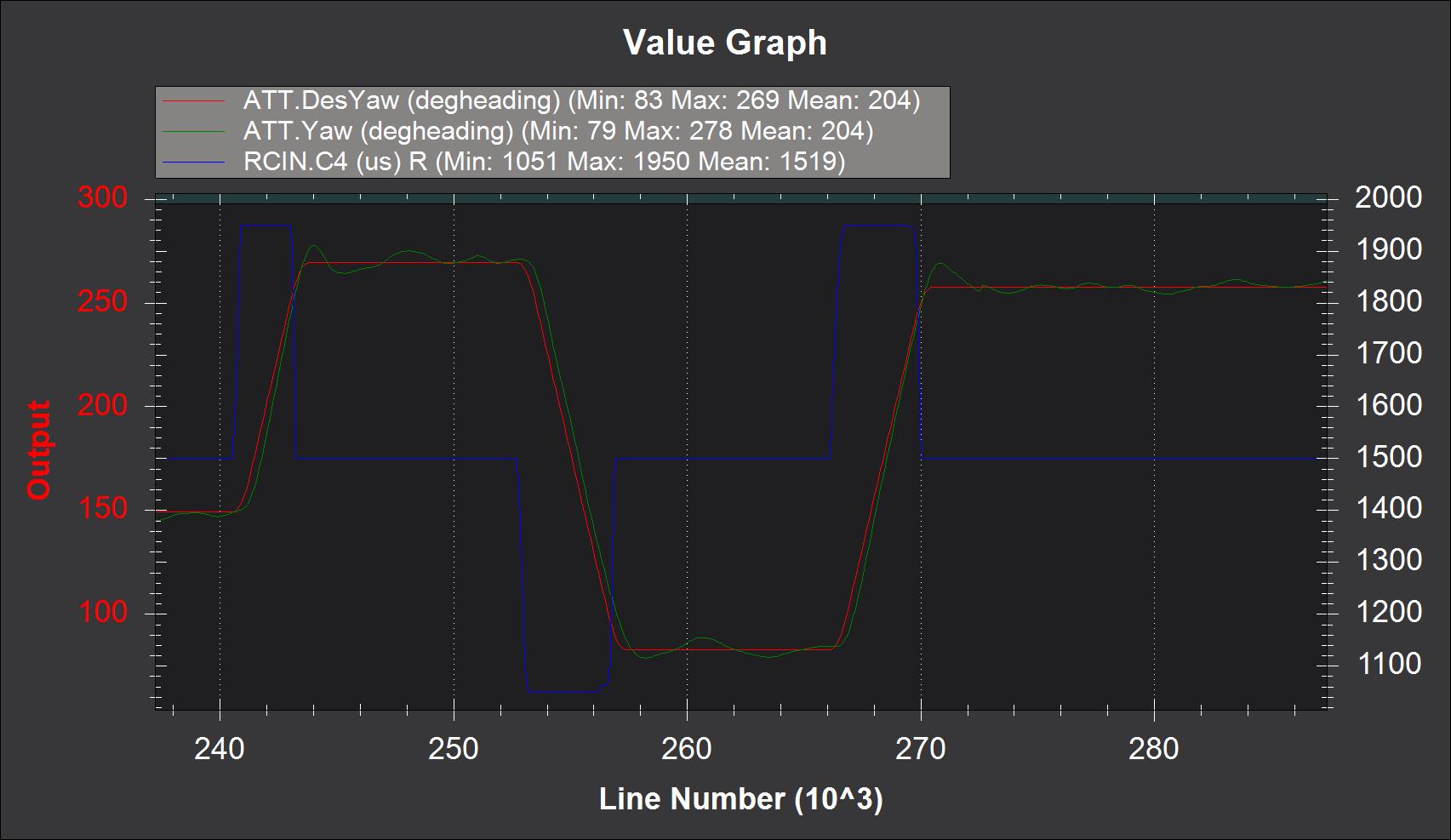
I increased Q_A_RAT_YAW_P from 0.18 to 1.6, I from 0.018 to 1.0 and FF from 0 to 0.2.
No oscillations so far to see.
And it behaves on the line as usally in the rack with stick inputs. Escpecially P was much to low.
Now I will continue with other Params.
During the Rack Tests I’ve seen, the Wing tend to roll with stick input Neutral. The Accel is calibrated in FBWA position. (Belly) But when in Tailsitter position, the Wing shows 4° roll. When adjusted with the param AHRS_TRIM_X then it shows a roll in FBWA Position. The same in Pitch which could be compensated by TRIM_PITCH_CD. But roll not leveled in “both” Mode has negativ effect. Either in Hover it drifts away or in Level flight it makes continuous turns.
Are there other Params than AHRS_TRIM_ … to adjust this diefference?
TANDEM WING Tailsitter Question- Hi all, I’m new to this thread and so excited to see @losawing flying his Black Fly(ish) Tandem. I see a lot of collaboration amougnst the forum participants to make it happen (very cool) Seeing the Full scale Black Fly at Oshkosh over the past 2 years inspired me to explore RC tandem wings. Here is a link to my version of a tandem wing tailsitter flying:
I’m a little embarrassed after seeing how well losawing’s Tandem flies, but here is some specs: 6 motors (4hover motors and 2 pushers used for forward flight… fwd flight wing motors shut down) 8 control surfaces - 4 on the front Canard wing, 2 on top wing, and 2 drag tip rudders. Hover all 6 motors are running but only the 4 wings mounted motors provide stability control (2 pushers are just slaved to the throttle) Hover yaw is from only from the outboard elevons on each wing. (in the video the winds were 16km with very good yaw control) Forward Flight - Outboard elevons on each wing provide roll… Pitch utilizes and 4 control surfaces on the canard wing, and the top wing provide about 40% proportional pitch through the elevons. Forward Flight Yaw is only through the drag tip rudders (very coordinated turns).
Construction: shaped foam board, hot glue, painter sticks and a few square carbon fiber tubes for the struts and landing legs. 48 Inch wing span (Canard wing has a 7inch cord and top wing has a 9inch cord… both wings would be close to a ClarkY airfoil.
I have a DX6 Tx and needed 14 outputs(8servos+6motors), so I slaved two KK2 boards together running openaero VTOL. The KK2 board is very easy to work with but is very limited when wanting to work with Mission Planner etc.
QUESTION(s): I have a Pixhawk 4 flight controller with the separate power distribution board witch integrates 8 Motor (io) outputs and 8 FMU/PWM outputs. I have some experience with Mission Planner and QGround, but I’m having a hard time understanding the mapping for the servos and motors. Does anyone in this thread have experience with Pixhawk 4 with the extended power distribution board and outputs?
The original documentation say I should load ArduPlane and activate setting for quad tailsitter. From what I can see in this thread… should I load ArduCopter and go tailsitter from there?
I originally has PX4 firmware loaded on the Pixhawk, switched to ArduPilot. Which firmware should I use/flash?
Sorry for the big info dump and multiple questions!
Any help would be appreciated.
Cheers
There is a q_trim_pitch parameter that I never used. But nothing for roll.
I think AHRS_trim is populated by accelerometer level calibration and should be manually modified only if you are not happy of the plane attitude when flying level.
I never had a drift issue with any axis when hovering.
Are you sure your Tx send a PWM value within the dead zone?
Maybe make again TX calibration.
Do you have q_a_rat_rll_I high enough ?
hello tim,
Nice to hear a new tailsitter fan.
I do not have experience with pixhawk 4.
In the ardupilot world a Tailsitter is a specific quadplane and quadplane belongs to arduplane. So your documentation is right. https://ardupilot.org/plane/docs/quadplane-support.html
Great… so the path I should follow is copter X tailsitter through the arduplane stream? I thought at the beginning of the thread one of ArduPilot developers was making the adjustments to your Tandem Wing through ArduCopter. Looking forward to see if I can mirror the results I had with the KK2’s and incorporate some automation.
I’ve never noticed the roll axis neutral changing between FW and VTOL modes. But the FW mode roll axis is bodyframe X and the multicopter mode roll axis is bodyframe Z. And I wouldn’t expect AHRS_TRIM_X to affect multicopter mode roll…
Do you still have Q_TAILSIT_INPUT=0 ? It would be interesting to see whether changing it to 2 has any effect on this.
Welcome Tim. Congratulations on making another multiwing tailsitter fly!
I’m not familiar with OpenAero; did you have to modify the code to support your configuration?
Was the motivation for the pusher motors to optimize efficiency in forward flight? What are the pitch speeds for the hover and pusher props?
I haven’t used the Holybro Pixhawk4 or PDB either. As Pierre says, you want to use ArduPlane and set the Q_ENABLE parameter to 1 to get quadplane features. We might need to add a new frame type to support your motor configuration though.
Hi Mark,
OpenAero worked without any mods… basically you have 5 inputs and 8 outputs. Any output would be mapped to servos or motors.
The intent for the pushers is battery efficiency, flight duration and speed. The ultimate goal was to use stabilization in hover, but have the ability to fly the plane in forward flight as a traditional airplane with the ability to glide under full control even if I loose the pusher motors… that’s why I didn’t want to rely on differential thrust in forward flight.
Pitch speed were very low… the hover motors will pitch the vehicle over immediately into forward flight and spool down over a 3sec transition. Because the wings are blown, it had very good slow flight characteristics. (3sec transition out and 2sec transition back).
I will work through the ArduPlane and Q_Enable setup. I’m just have to wrap my mind around the 8motor IO outputs on the power distribution board and the 8FMU/PWM outputs on the same board. Not sure if these are the same or if I can use all 8 motor outputs + 8 PWM outputs for the servos.
Param I is at 0.8.
But Roll issue loacated. The FC was not fixed verry precise in longitudinal Axis (Z) which can’t be calibrated. And when in Tailsitter Position this means 4° Roll as level. And with this roll, it drifts away.
Now I will reassemble it precisely as possible (vibration damping) and if nescessary use adjusting screws I know, an old fashioned method beside the 1000 Params.
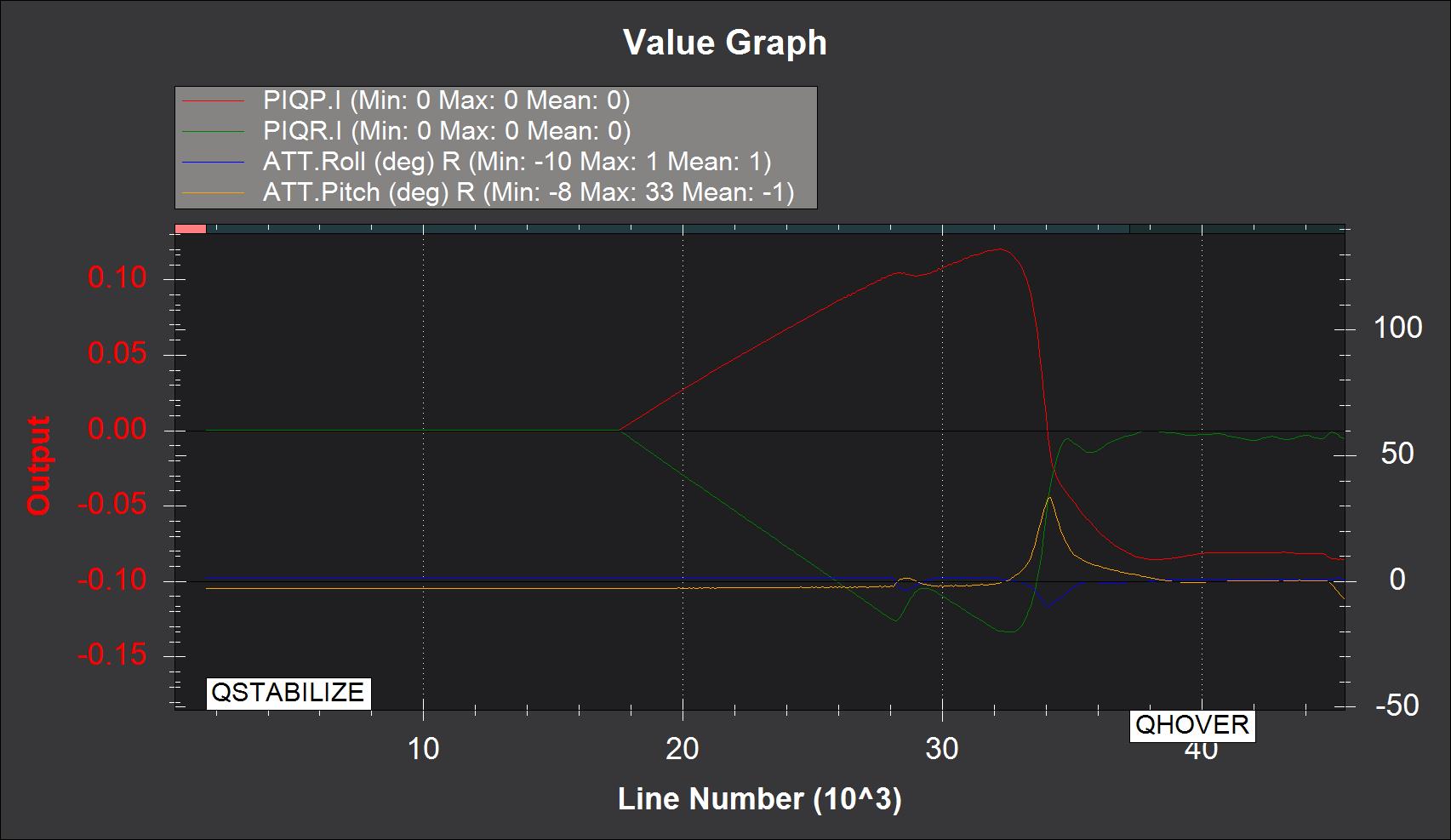
I noticed, that Roll and Pitch Integrator runs up, when Throttle is increased slowly and the wing not exacly leveled on the ground. Und then, when Throttle is high enoughe, it lifts of with a overreaction to level. I did not see this with my copters. The Integrator should start when Throttle is above Q_M_THST_HOVER only or another Param who define it is in the air. I try to show it in the graph. (Especially Pitch)
Hi Mark @kd0aij and Pierre @losawing
Hours and hours of research reveals that there are many Pixhawk 4 uses having many problems with Mission Planner and Qground.
Which flight controller would you guys recommend that would allow for 6 motors + at least 6 servos for control surface?. Which FC is in Pierre’s Black Fly?
Would love to hear your thoughts.
Tim
The standard Pixhawk hardware design provides 8 PWM outputs on the IO coprocessor plus 6 on the FMU. Those I’ve used include the original Pixhawk and the mRoX2.1 (both available from mRobotics) https://ardupilot.org/plane/docs/common-autopilots.html
There’s also the “Cube” line of controllers, but I don’t have any of those.
If you are willing to use SBUS servos, or SBUS to PWM converters, you can also have that many outputs on a PixRacer…
It has 8 main pwm output and 6 aux pwm output. I have 4 control surfaces assigned to servo 1-4 and 4 motors assigned to servo 5-8. I have never used aux output but I think they can be used for more control surfaces.
Working on the FC now… Setting up everything in Mission Planner.
Everything Calibrated… including Radio compass and accel… I can arm it through the “action Tab” but not through the rudder.
Also for arming… For now, I’ve set the ARMING_CHECK to 0, ARMING_REQUIRE to 1, and ARMING_RUDDER to 1… but can’t get it to arm with rudder?
When armed I can’t get servo movement on any i/o pin or Motor spin on any i/o pin to work.
Thoughts?
Rudder was reversed… sorry that was a rookie move. Already kicked myself in the ass for that one.
Manual Mode: I should have mentioned that I has already switched all flight modes to manual before sending the message, but still nothing (motor or servo). I’ve confirmed that servo is receiving 5v and have tried connecting signal wire to all 8 i/o pins moving all sticks each time moving to the next pin… same with esc (4s batt voltage to esc confirmed) again signal wire tried on all 8 i/o pins… no luck.
Question: is there a full param list of a working pixhawk model that I could see, and go through line by line to see if I’ve missed a step? I’ve visually gone through line by line, but nothing sticks out.
Here is my Param List attached.
Main differences were
BRD_Type 2 on biwing and 24 on mine
Q_FRAME_CLASS, 1 on biwing and 10 on mine
RSSI_TYPE, 1 on biwing and 0 on mine
Tried to make some changes… still not signal on i/o PWM or motors.