My copter keeps switching back to LAND flight mode in mid flight or sometimes right after arming.
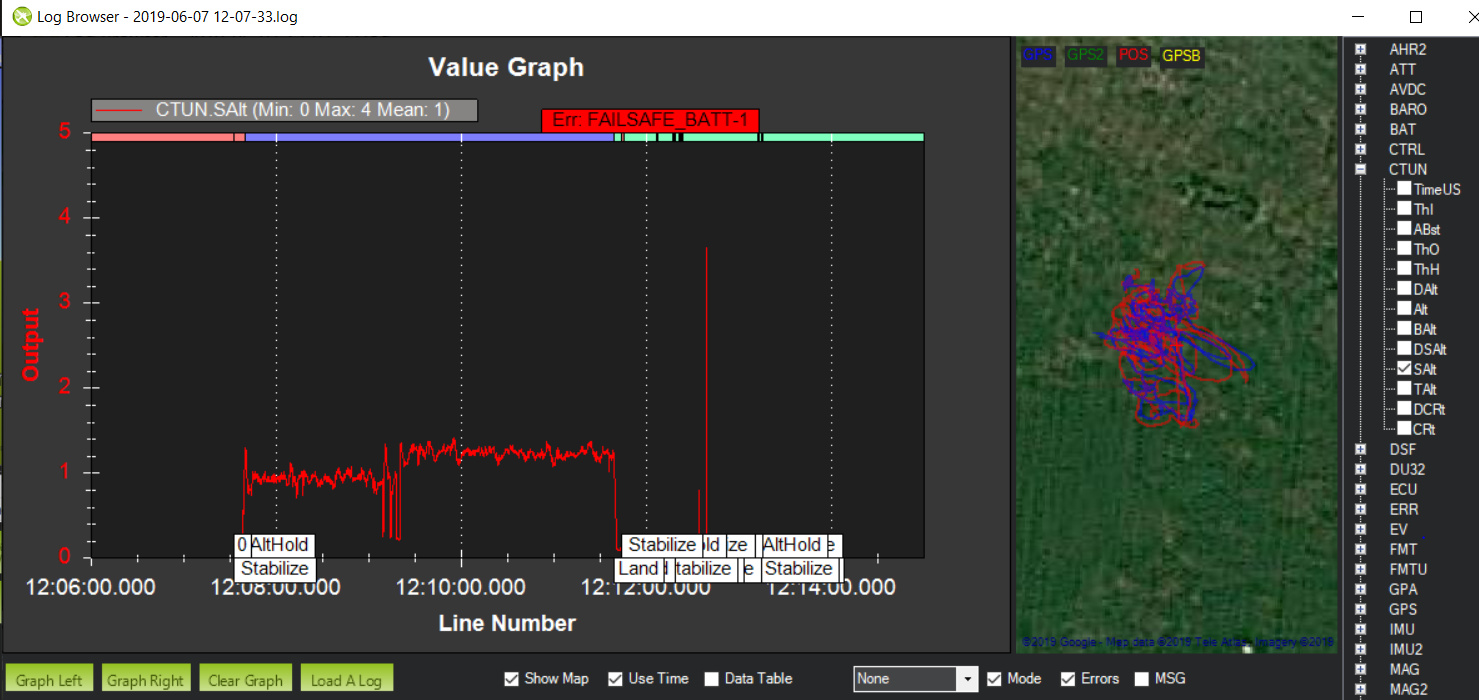
Here is a screenshot of the log with the mode changes (log is attached):
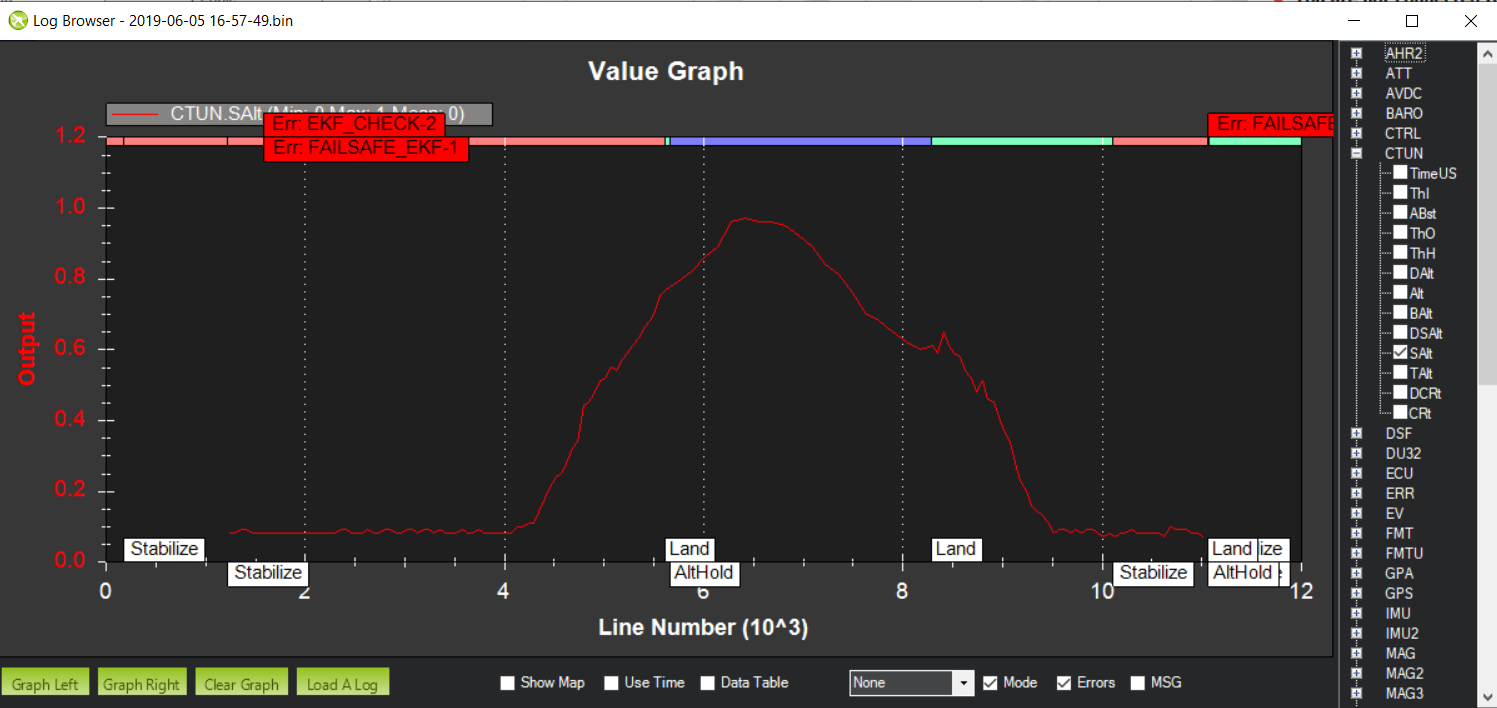
I thought this might be due to the “Err: FAILSAFE_EKF-1” error I’m getting in some of the logs but this EKF failsafe shouldn’t trigger a switch to LAND mode since my parameter “FS_EKF_ACTION” is set to 1 (LAND and not “Land even in stabilize”) which according to the documentation and the code (see below) shouldn’t trigger any action in non-GPS modes like stabilize and alt_hold.
// does this mode require position?
if (!copter.flightmode->requires_GPS() && (g.fs_ekf_action != FS_EKF_ACTION_LAND_EVEN_STABILIZE)) {
return;
}
Other things that could be triggering this:
- GCS Failsafe is set to 1 and I have a companion computer sending proximity sensor mavlink messages to the Pixracer. Would a loss of communication with the companion computer trigger the GCS failsafe? … I don’t see any GCS failsafe message in the logs though.
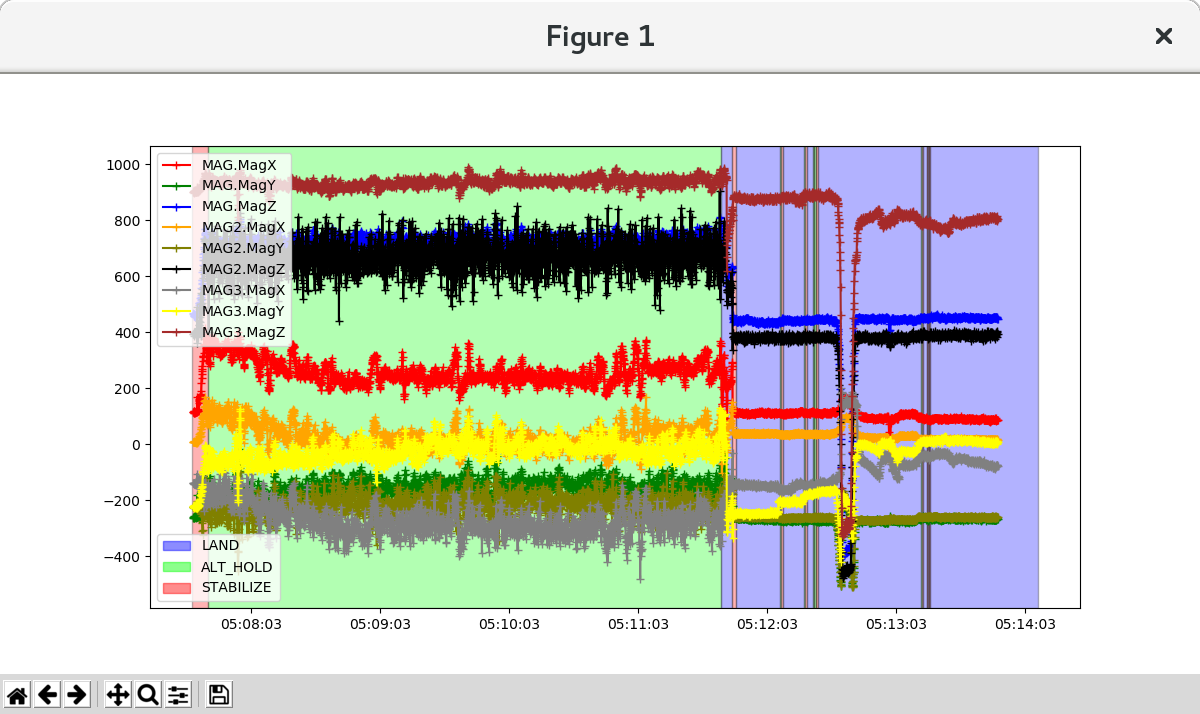
- all 3 of my compasses are disabled. This is on purpose as I’m using this setup for indoor flights where there is a lot of metal around the drone. Could this be triggering the EKF failsafe and then in turn the LAND?
My setup:
ArduCopter v3.7.0-dev running on Pixracer
Flight modes configured: stabilize and alt_hold (land is not part of the configured flight modes)
companion computer: Odroid XU4
all 3 compasses are disabled
Thoughts on what’s creating the problem?
2019-06-05 16-57-49.bin (488.3 KB)