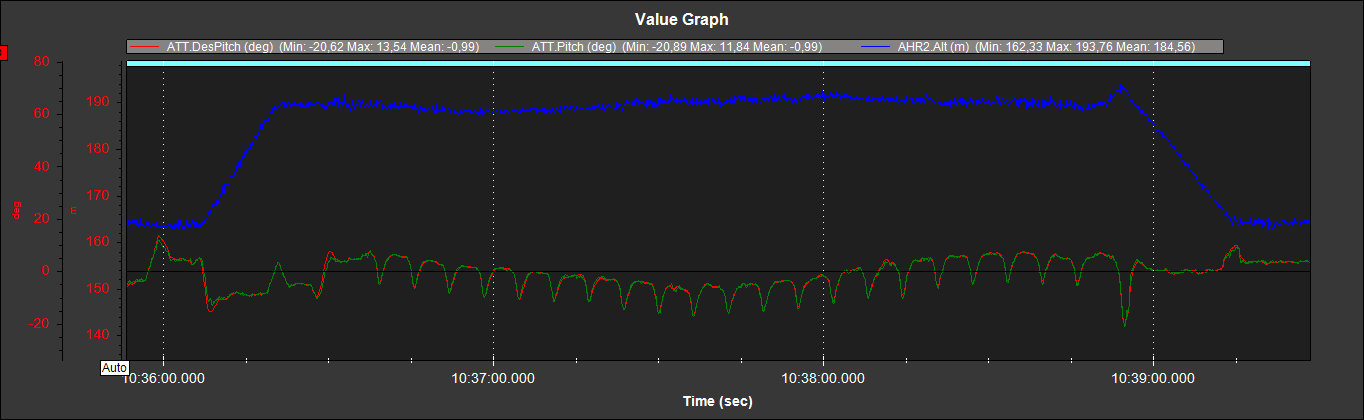
One of our X8 copters pitches everytime a waypoint is reached while flying a circle around a point of interest (copter facing the point). Here is an extract from the log file to illustrate:
The blue trace is the altitude just to help identify the start and stop of the circle being flown. The green and red trace are the actual and desired pitch and shows these strange behavior on each waypoint.
Except for this the drone generally flies well, any ideas where I can start looking to solve this?
We have more than one of these drones which are basically identical. So the first autotuning (followed by some manual tuning) was done on another drone where we do not have this effect. I then used the same parameters on this drone. So no, I have not done autotuning on this specific drone as I did not expect tuning to be the problem. In normal loiter flights it flies fine and the desired and actual values track pretty good.
This is something I could try then.
The notch filter I have also not done yet. This is for sure something I want to do and will do as soon as possible.
We normally do not jump to the latest firmware versions, this is just in case there are some unknown bugs which have not yet been detected.
Maybe also worth trying, I can always flash it back to v4.1.1 if it does not solve anything.
It is just interesting that we have other drones with the same configuration but not this problem. Which probably means it could also be something mechanical…