I was testing a quad indoors using Marvelmind beacons for position, but trying a flight in AltHold mode.
After arming the copter and rising the throttle (not even to mid position), suddenly motor 1 spin up really fast, pulling the quad to the side and crashing into the wall.
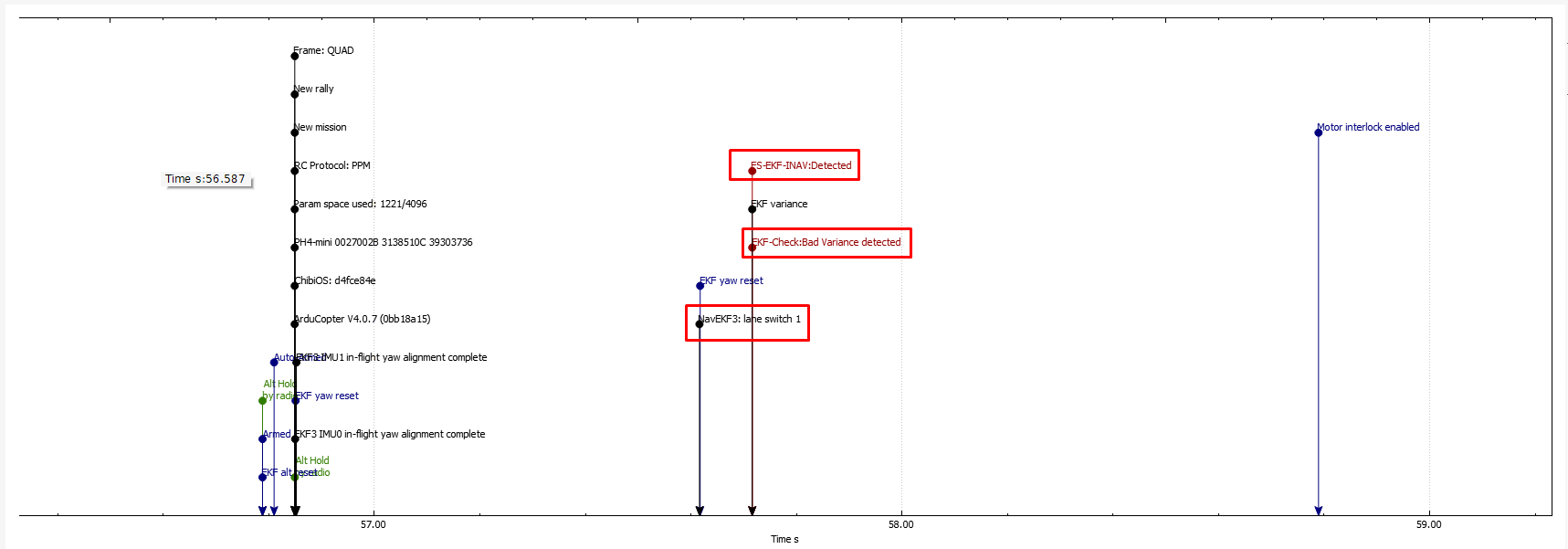
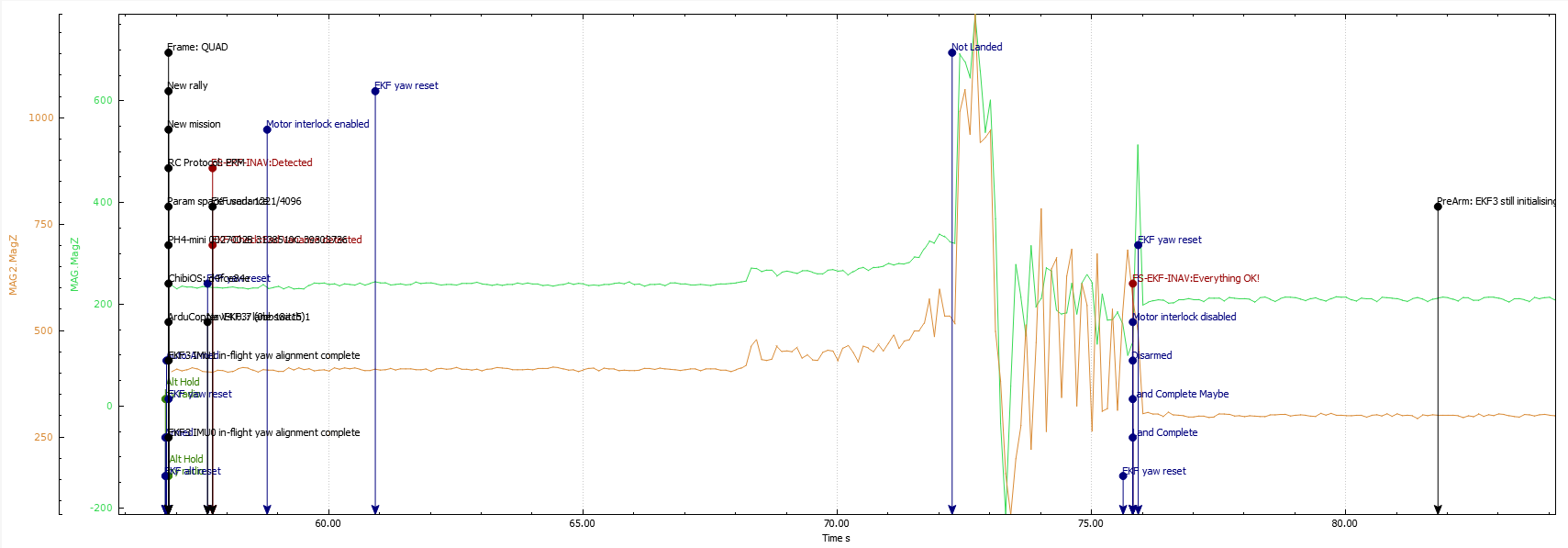
Checking the log, I see no intentional attitude change from the autopilot, still it sent rising signal values to the RCOUT1 channel.
What could have been the issue here I’m not seeing?