Well flying quad, just built with custom (and rigid) 3D printed carbon frame. Over 25 flights on it with early tuning and setting, and then I decided to tighten up the pitch axis with an autotune. I flew a single axis autotune for yaw and it worked perfectly on a previous flight. This time, during a twitch, the motors stop and the drone freefalls for about 10 feet, upon where I manually give full throttle to try to recover the decent. It tries, but is unable to recover downward velocity. Minor frame damage, everything else intact due to overbuilt and strong frame. However, it seemed to have lost motors for a split second during a twitch. Can someone please help me diagnose this issue with my logs? It would be greatly appreciated. I am still learning to read logs and know what to look for. I am suspecting a firmware glitch in the build, since it was completely on its own, and flying well other than that.
Equipment: KDE 35A opto servos,
KDE 22A BEC at 6V to rail for servos
KDE3510XF 715kv motors with 15x5.5 APCs
Cube Orange running Arducopter V 4.1.0Beta3
Here3, Herelink
Quad V frame setting
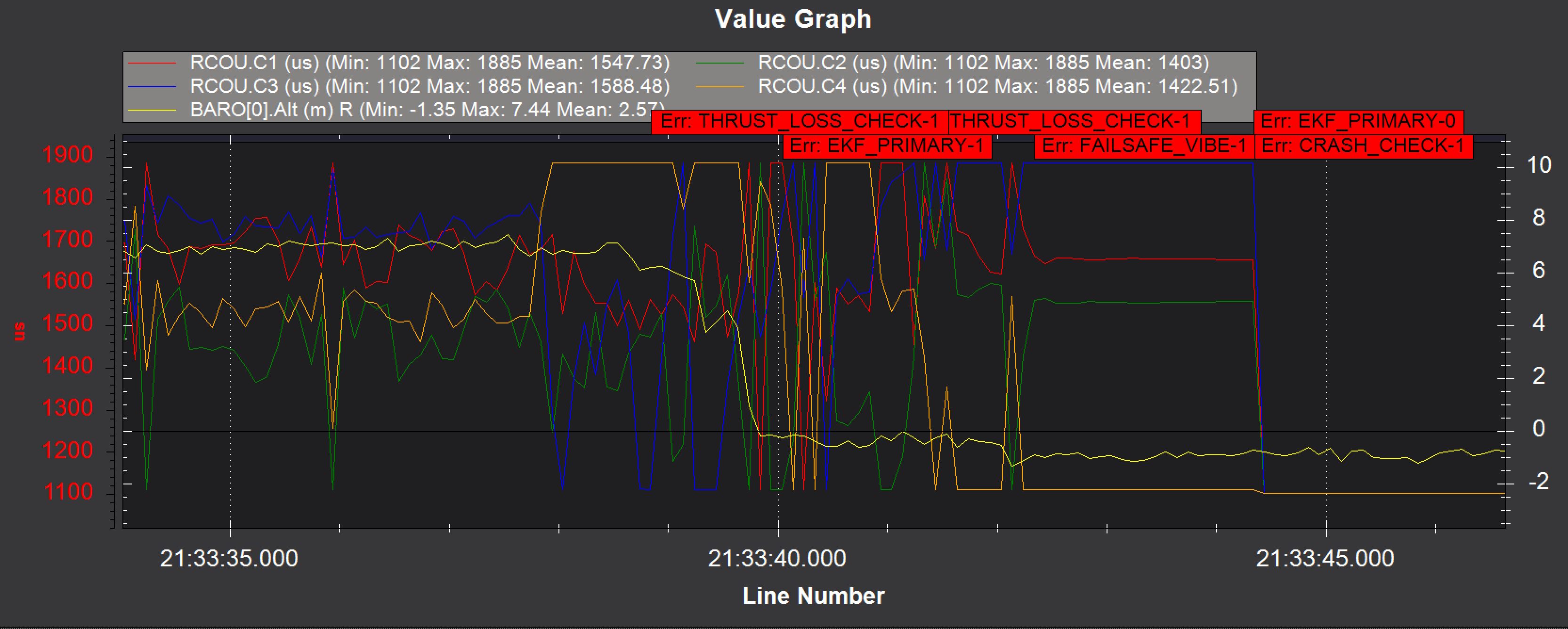
There was thrust loss on Motor 4 which was commanded to max and the opposite arm Motor 3 to minimum to compensate. Overall thrust loss and down she goes.
Thank you so much! Ok, so it seems unrelated to the autopilot? As a matter of fact, one motor was unusually hot when it crashed, and I checked everything for heat right away. One motor would burn me almost, and the others were cooler. Could there have been a motor overload that caused the motor to fail/stop? If so, there could have been a defective motor? Or was there an issue with ESC calibration? I did calibrate several times, and it takes off smoothly so I would think it is not that. Trying to figure out definitively what happened before attempting more flights. BTW the drone was somewhat heavy with 16800 mAh on board (4s) so I am wondering if a motor burned because of excessive weight. All other flights before were on only 2 of the possible 4 batteries, and only 2-3 flights before on all 4 batteries. Thanks again!
Yea, you probably shouldn’t have run Auto Tune with that load. The motors were cycling to command max trying to twitch the craft so that’s not a condition you want to save PID’s for.
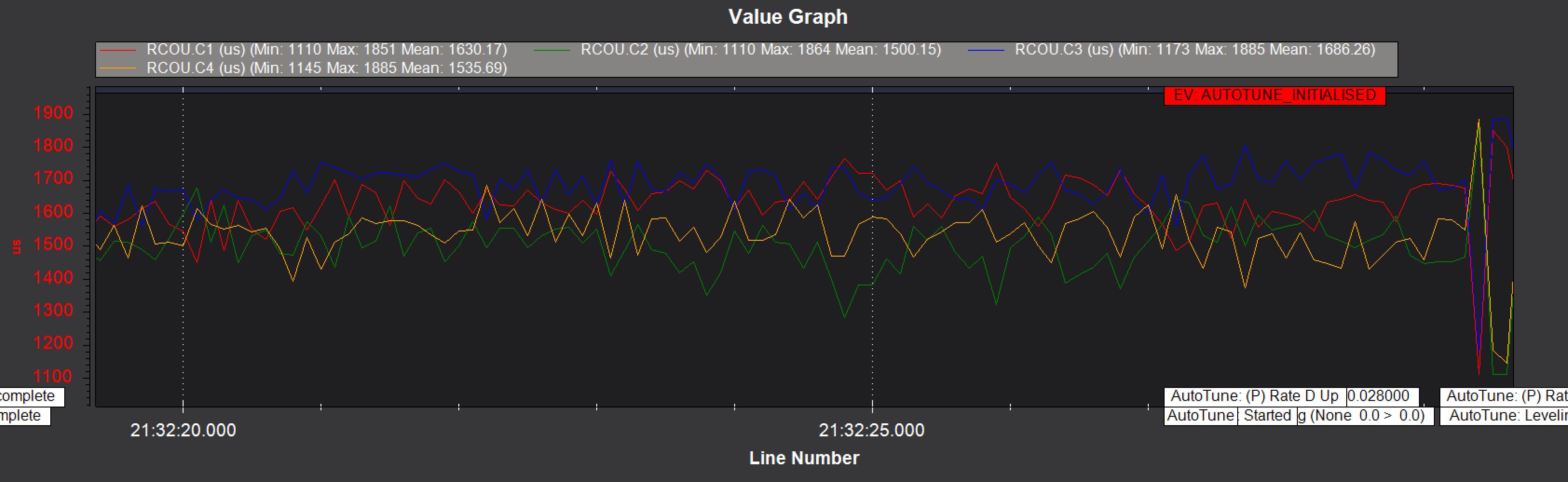
Here are the RCout’s at Hover just before Autotune. Average output ~1600us. Not terrible and it would probably be fine for normal flight but the agressive commands from an Auto Tune session did it in.
Thank you so much for that Dave. You have been awesome to help me think it through. I just checked the motor that was hottest, and the windings are a hair darker than the other motors. So it indeed seems the motor lost it. I will certainly do auto tune with lighter loads next time, which is less than max gross. Many thanks!