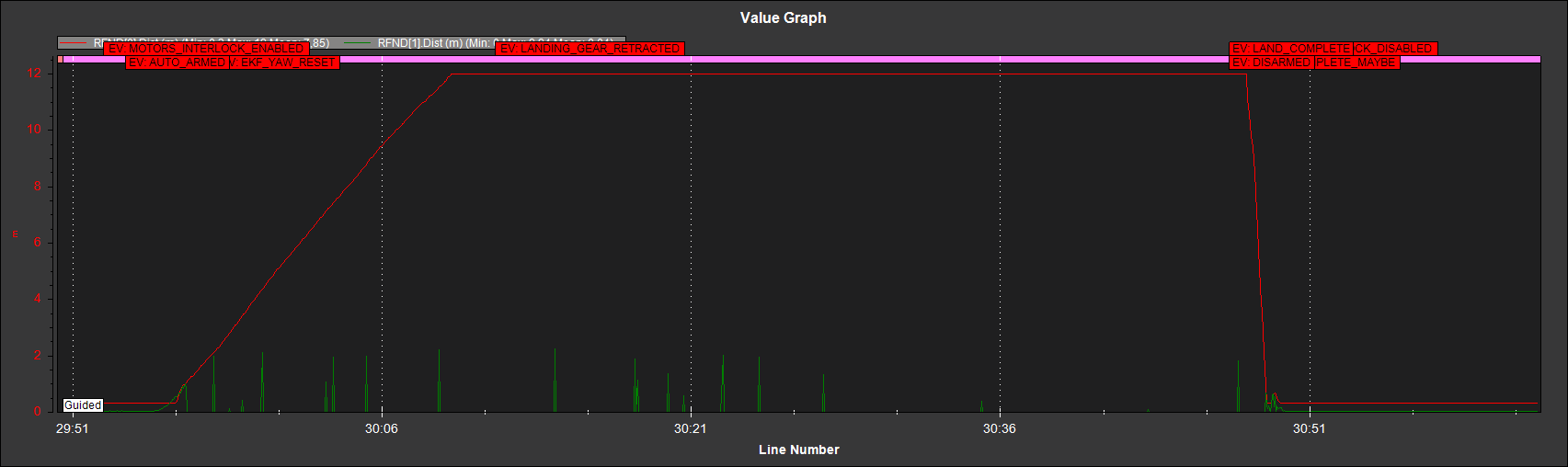
while testing today after updating the FW to 4.1.2 and updating settings, the quad disarmed while hovering approx. 15m in the air.
After inspecting the log, it seems like the FW thought that the quad was landed and then deactivated the motors. Sadly, I don’t know my way around the logs enough to find out exactly what happened and it might be interesting for the devs too. I’ll attach the .bin file and the settings file.
FC: Matek H743 Slim
ESC: T-Motor Velox, using dshot
GPS: Matek M8Q-CAN
RC: Crossfire Nano
Props are 7"
Using a Li-Ion battery with 1450 mAh and 30C
The copter was connected to a RPi running OpenHD 2.0.7 and getting commands from a custom GCS software.
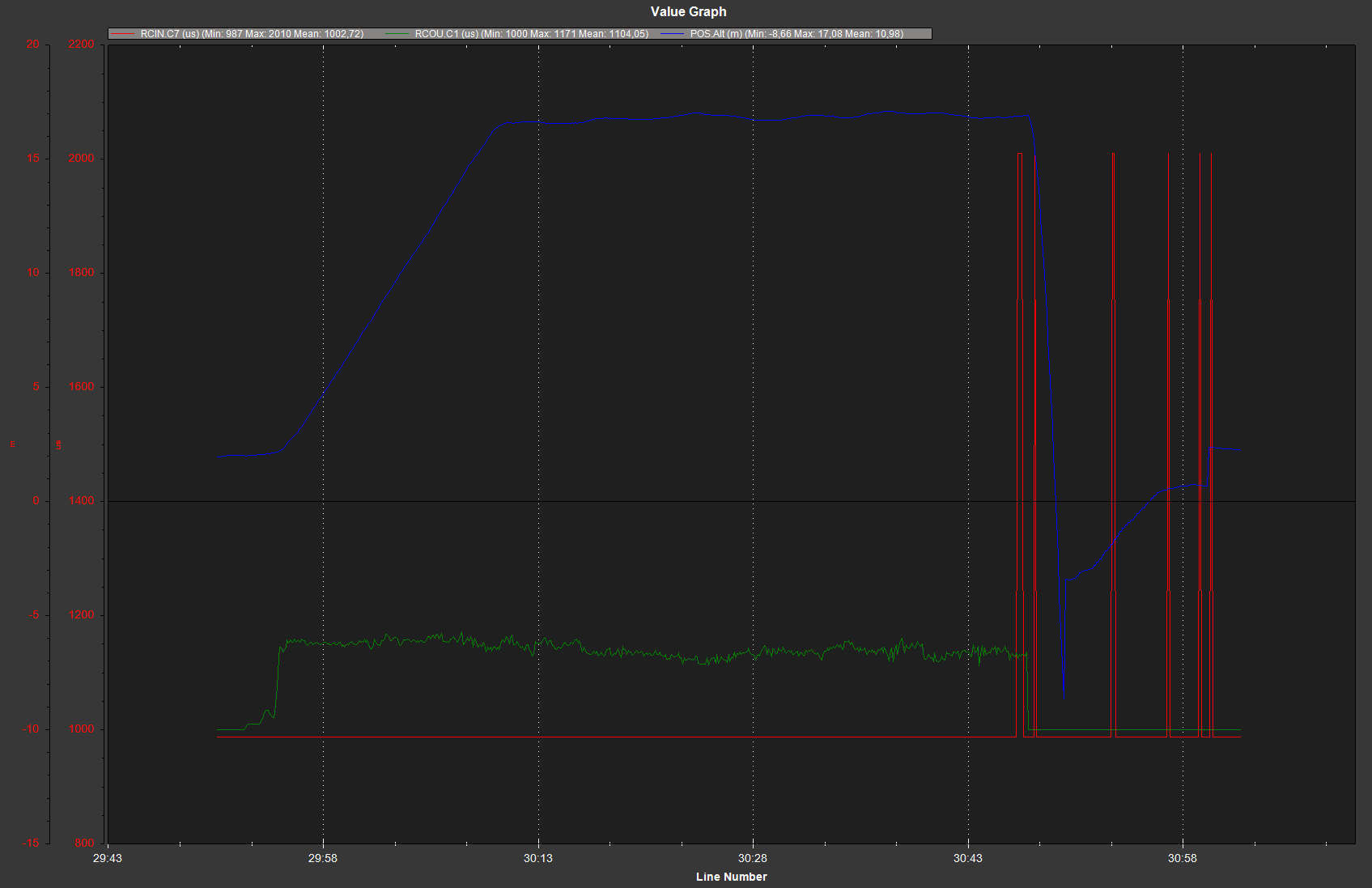
Here we can see that RCIN.C7 (red), which is my switch for disarming, was toggled to high and then low again. Afterwards Arduplilot deactivated the motors (green line) and the drone fell (height in blue).
Why the switch was toggled to high (thus taking over control from the GCS) is unclear, but lesson learned: When the GCS arms the drone, set the arm switch on the transmitter to high too.