i’m stuck on autotune with my new build
i completed tuning process instruction and copter was sable enough to run autotune
but after autotune copter is completely unstable , i faced bad takeoff and wobble after applying roll and pitch
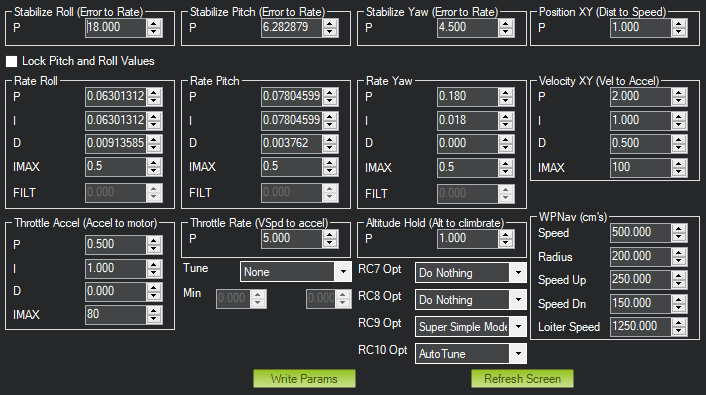
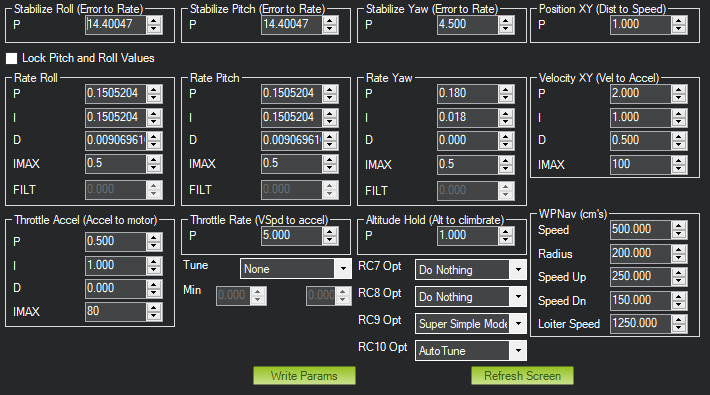
What were your PID’s before and after autotune, for pitch and roll?
When that has happened to me, it’s because autotune put my PID’s too low. But my vehicles are tiny, and autotune didn’t really know how to handle them (seems better the last couple versions of ardu…)
But for yours, it’s a relatively standard size copter. Someone better at analyzing logs might be able to tell you why it’s not tuning well.
But anyway, my guess is that your PID’s are currently too low so the copter can’t control itself well.
If your autotune_aggr setting was at .05, try again at .1 .
thanks @Leonardthall for your input
yes it seems that i was have ESC calibration problem with my last autotune
but i tried 2 Autotune before this and all was unsuccessful for example this , in this autotune motors are ok and copter was heavier
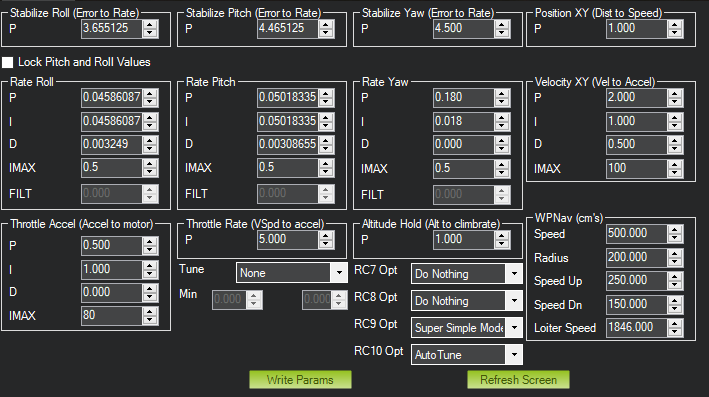
a note , i was using this FC with a smaller motors and it was autotuned with them and i was forgot to reset all parameters to default (only set default PIDs and anything in tuning process instruction till autotune) is this could make problem ?
UPDATE :
i did a full parameter reset and configured anything as new
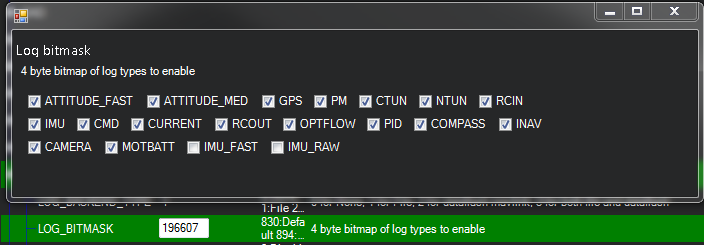
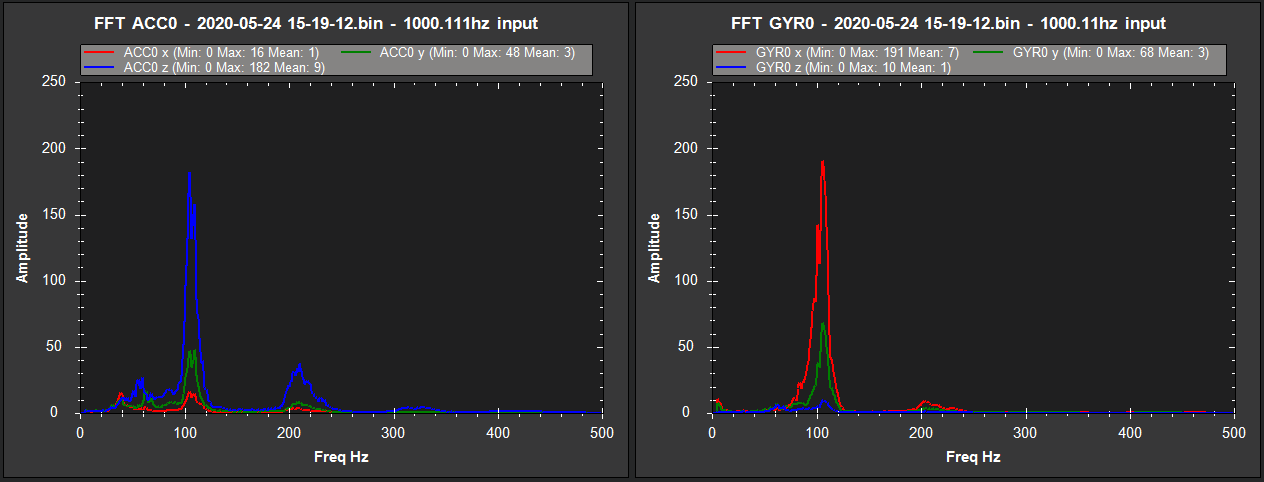
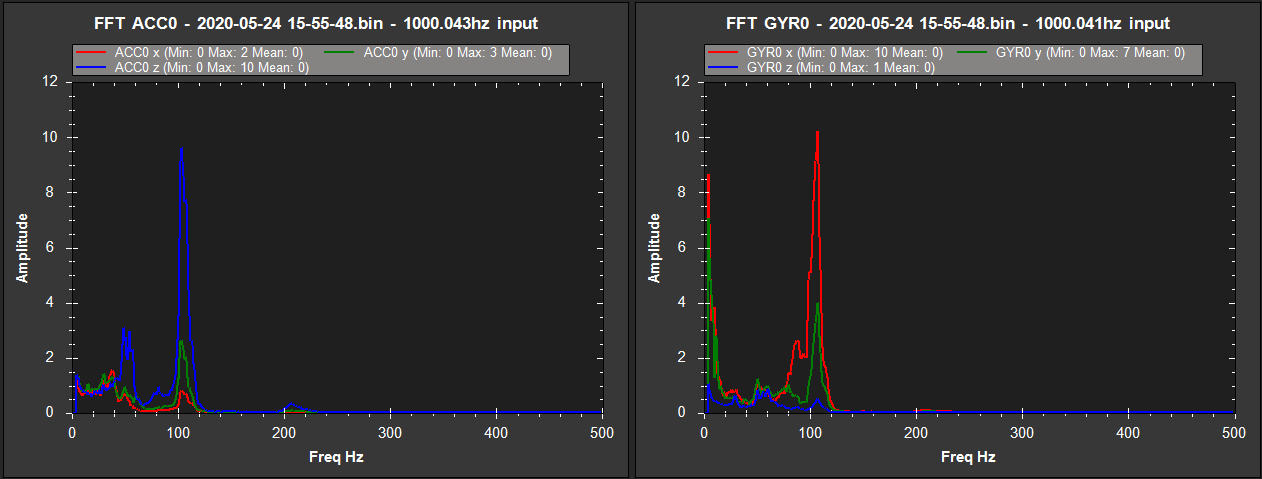
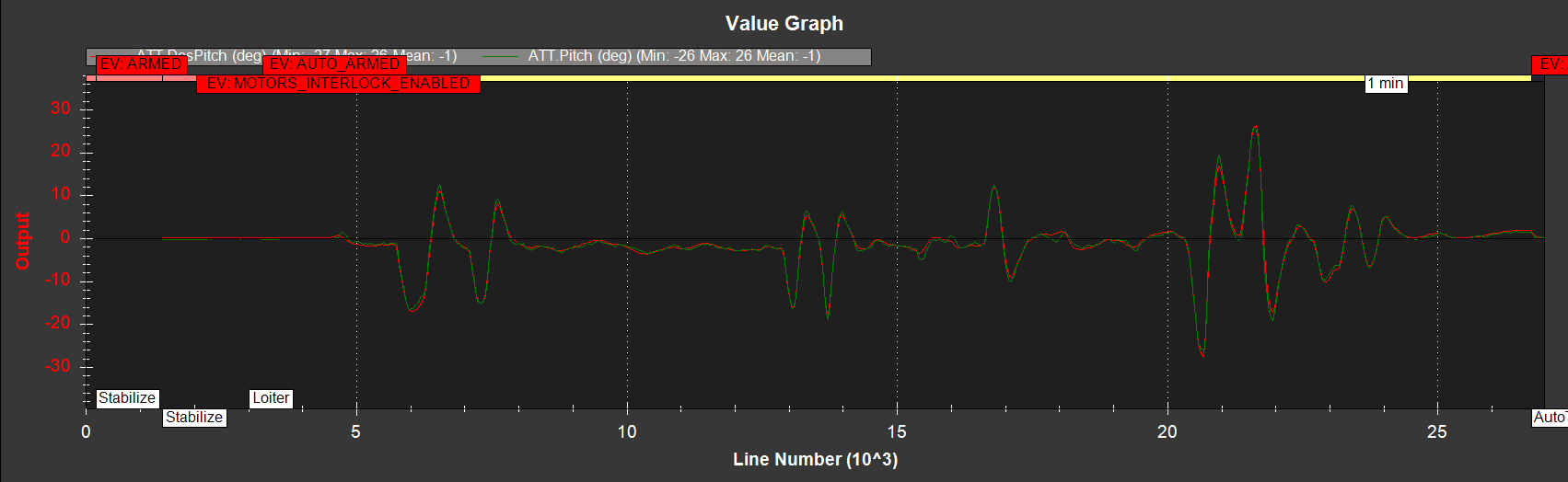
this is the log file after full reset, is it ready to autotune @Leonardthall ?
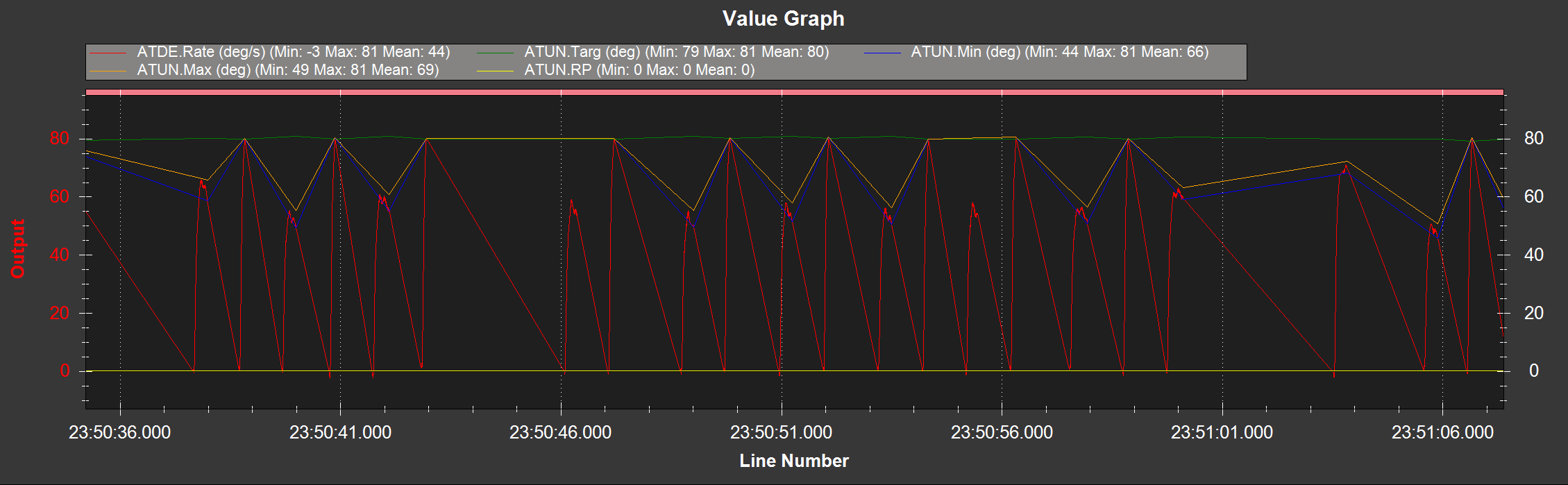
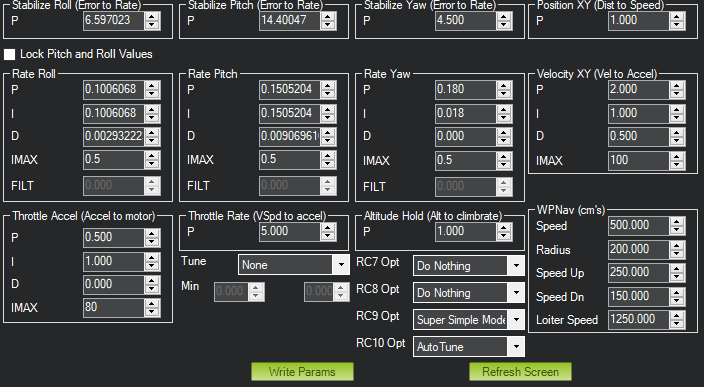
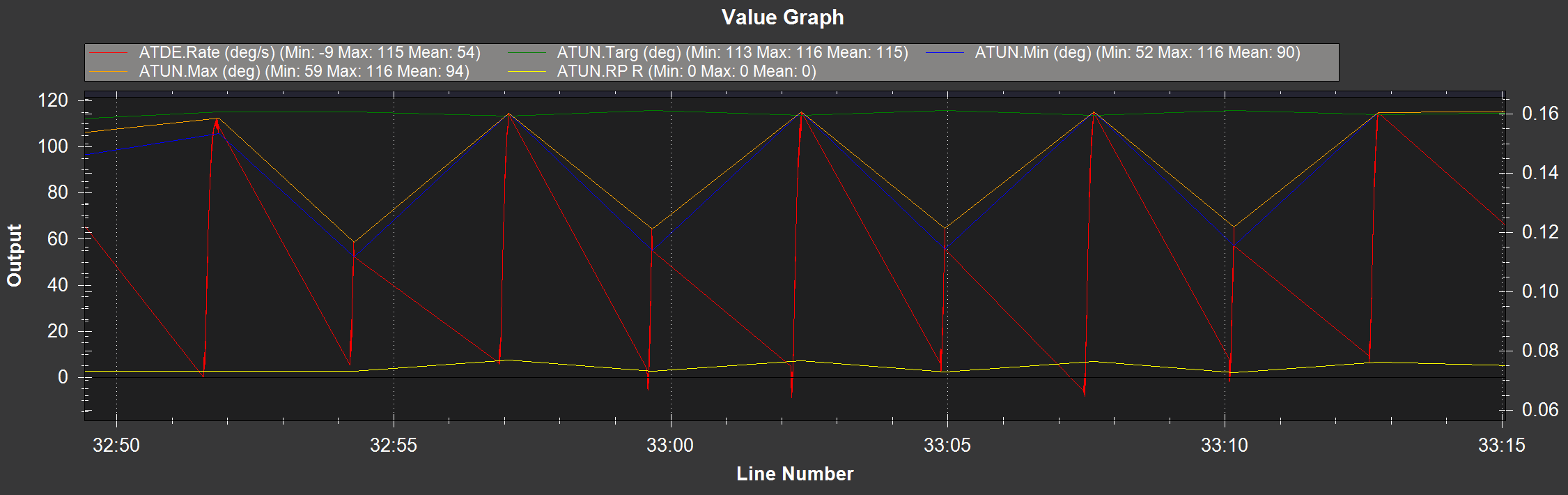
Your aircraft is getting inconsistent twitch tests.
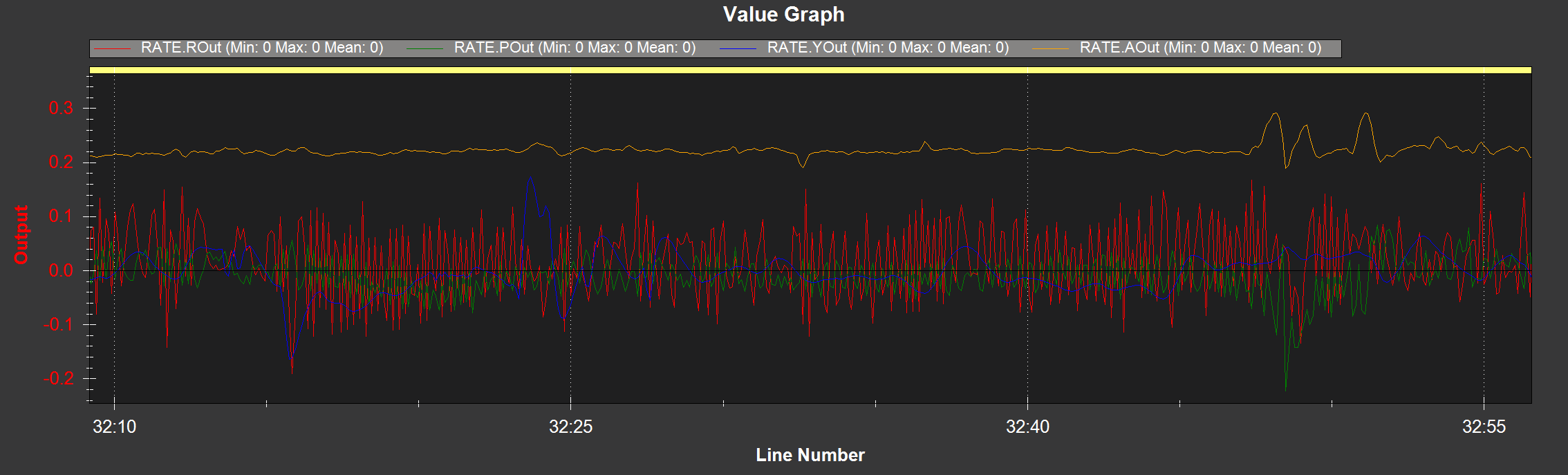
You still have a lot of noise and this may mean you need to set the AGGR to 0.2 to compensate for the high noise levels. Are you able to film the tune too so I can look at the aircraft during flight?
Is autotune_aggr = 0.2 safe ?
I don’t want to destroy this copter
Also some questions
The noise must be from motors or esc’s , is i’m right?
Is bigger frame could help?
My theory is make motors and esc’s far apart from FC
Yes, as always be careful on your first flight after autotune. This parameter does not change the tests just how far it will push the D and P terms. We want it to push higher and closer to your manual tune.
Most of the noise tends to come from the propeller passing over the arms and the high pressure air hitting the top of each arm. This shakes the frame. You then get noise from the frame moving, flexing and shaking. There is also noise from any unbalanced props or motors but this doesn’t tend to be huge on most systems unless you have damaged something.
So i was wrong , i was think there is magnometic effect on gyroscope
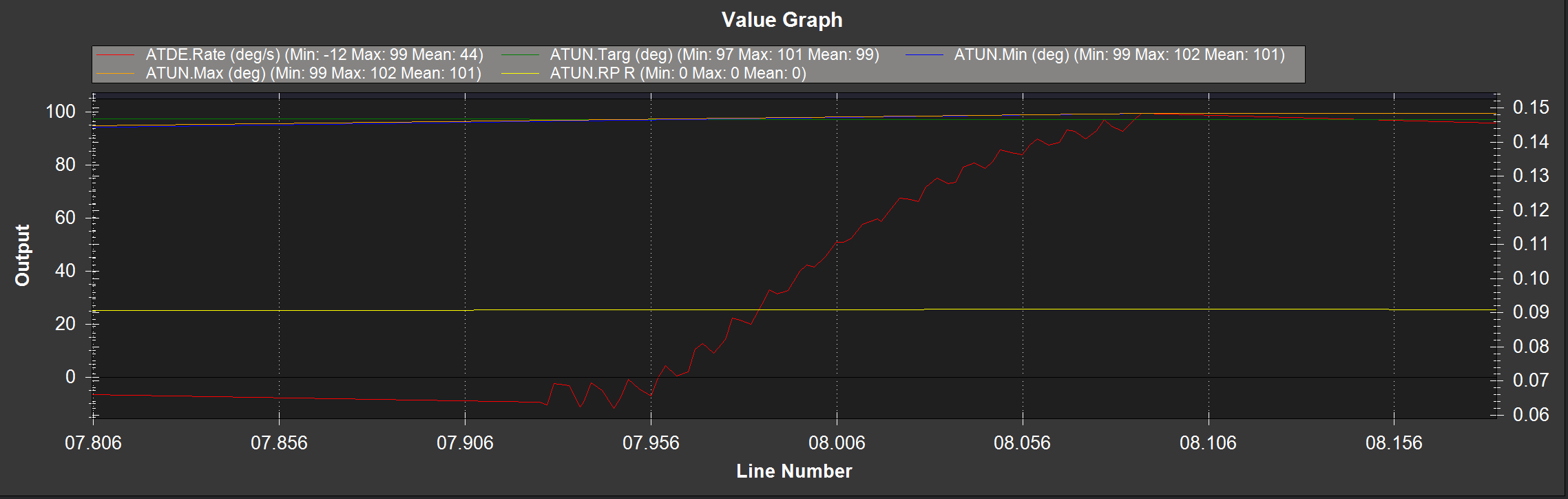
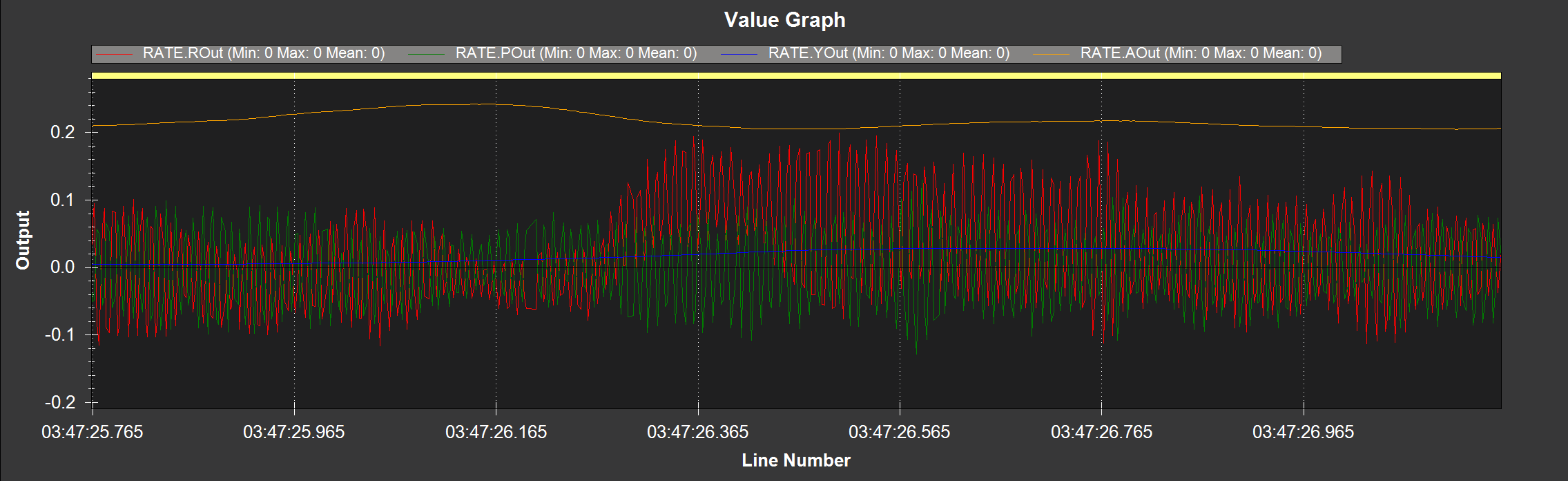
But all Vib* values are under maximum accept able values, how do you measured high noise on last log ? Cloud you please teach me more in this feild ?
How and where is your pixhawk mounted to your frame? The fact that one axis sees way more noise than the other two is often times from something structural.
Its mounted on center of frame with this vibration damper
Also i think its normal that to have higher vibration on z axis (i saw this on most multirotors)
I think that damper is intended for a smaller flight controller. I have had the best results hard mounting to the frame. The IMU may already be soft mounted inside of the case. The rubber bubbles can result in a delay between the vehicles movement and the flight controllers movement which is catastrophic.