Good day everyone,
I have been customizing Copter-4.0.7 specifically for my quadcopter (which uses a Pixhawk1 flight controller - original) and today, while testing a new code version, I found what must be a bug and so, I decided to write this on the foruns to see if anyone knows why this is happening/how to solve it or if it is indeed a bug on Copter-4.0.7 - since I have no clue.
I’ll start by saying that I first found this issue when running my code, but it seems that default Copter-4.0.7 as also something similar. I will also apologize for not uploading right away a log, but I’m not being able to extract from my board (I will get into it later) - I’ll have to wait to upload the logs (don’t have a sd card reader here).
For default Copter-4.0.7:
So, I have my quad on the ground, without any propeller and not even any battery connected to the ESCs. Connecting it to mission planner I get a reading of less than 0.1m/s for ground speed (which is constantly shifting), so no problem here. The problem starts to happen when I arm my drone, in Stabilize flight mode. This value of ground speed skyrockets to 0.3-0.4m/s (drone doesn’t even have propellers nor the motors are spinning). Disarming, the value goes down to 0.1m/s again. So, what may be causing this error? For the AHRS, arming the quad as it is, shouldn’t cause any modification on the values. So, why does EKF2 estimates skyrocket like this?
Also, when I tried to get the logs out of the board (first time I tried it), the connection timeouts and, most importantly, it causes a pre arm error: EKF starts changing between instance 0 and instance 1 (instance 1 has a value of ground speed of 0.2m/s and instance 0 has a estimation of more than 0.8m/s) - the board doesn’t get past this.
For my custom code:
The issue is very similar to what is happening with default Copter-4.0.7 but even worse. It behaves in the same way with the data logs extraction. I have a custom mode and arming the drone on it (again, without propellers and not even batteries connected), causes the ground speed to skyrocket to 0.8m/s and causes a permanente pre-arm check error (again, EKF instances constantly shifting between 0 and 1 - and instance 0 has a ground speed estimate of 0.3m/s and instance 1 of 1m/s).
Is this a known issue or has anyone passed through something similar and knows how to solve it? At the moment, the real problem is why EKF is giving this estimates and causing the pre arm check to fail, since arming should alter any of the estimated values, in my view.
Thanks
TLTR:
As soon as stabilize mode is armed, without propellers nor batteries connected, EKF2 estimate for ground speed skyrockets from 0.1m/s to 0.3m/s for a quadcopter which is on the ground, static, without moving. Same happens while trying to download log files but, this time, it skyrockets to 0.8m/s causing pre-arm check error with EKF, besides of a time-out.
PS: Here is the log, just arming the drone and disarming (with default Copter-4.0.7). Please let me know if it contains the information required (never debugged from a ardupilot log before).
https://drive.google.com/file/d/1v52sg0D--nNOV6PRF-Gk42iZklAUaCaw/view?usp=sharing
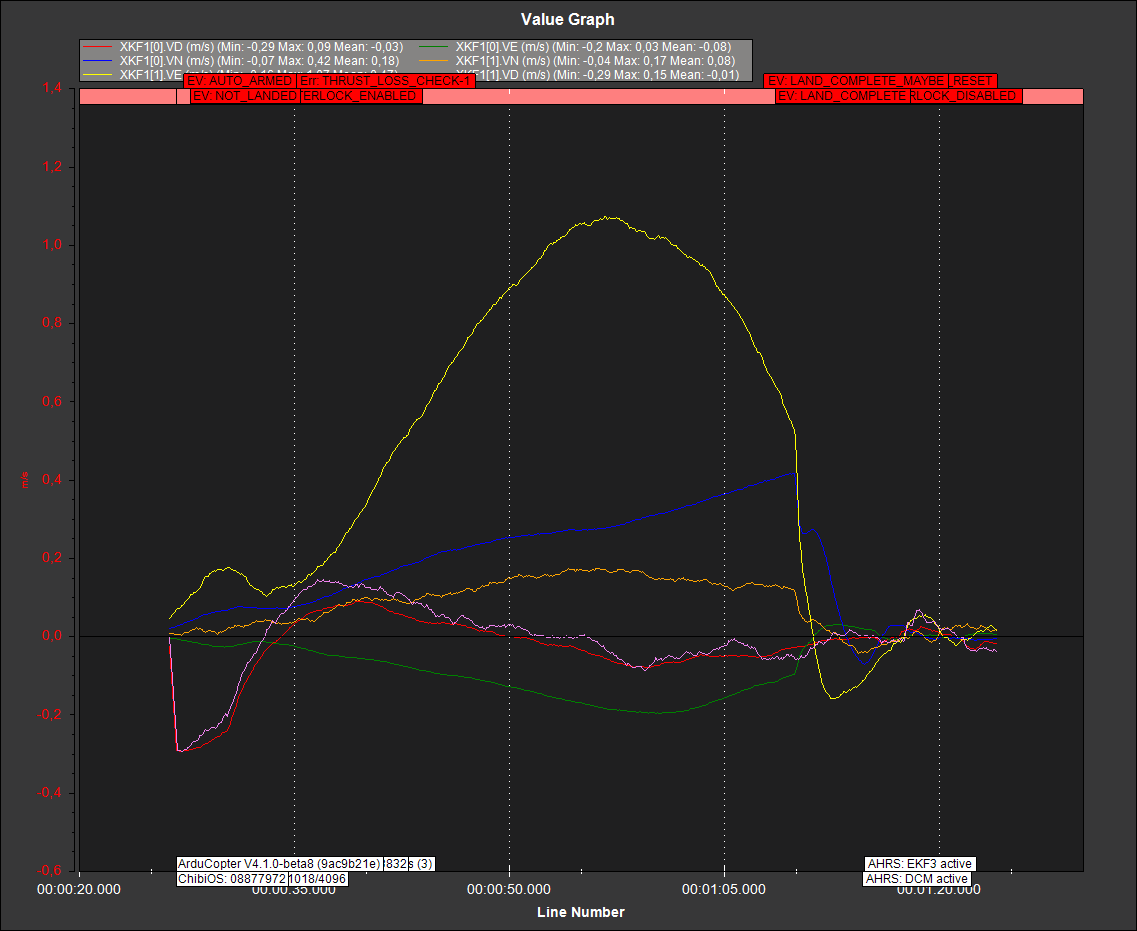
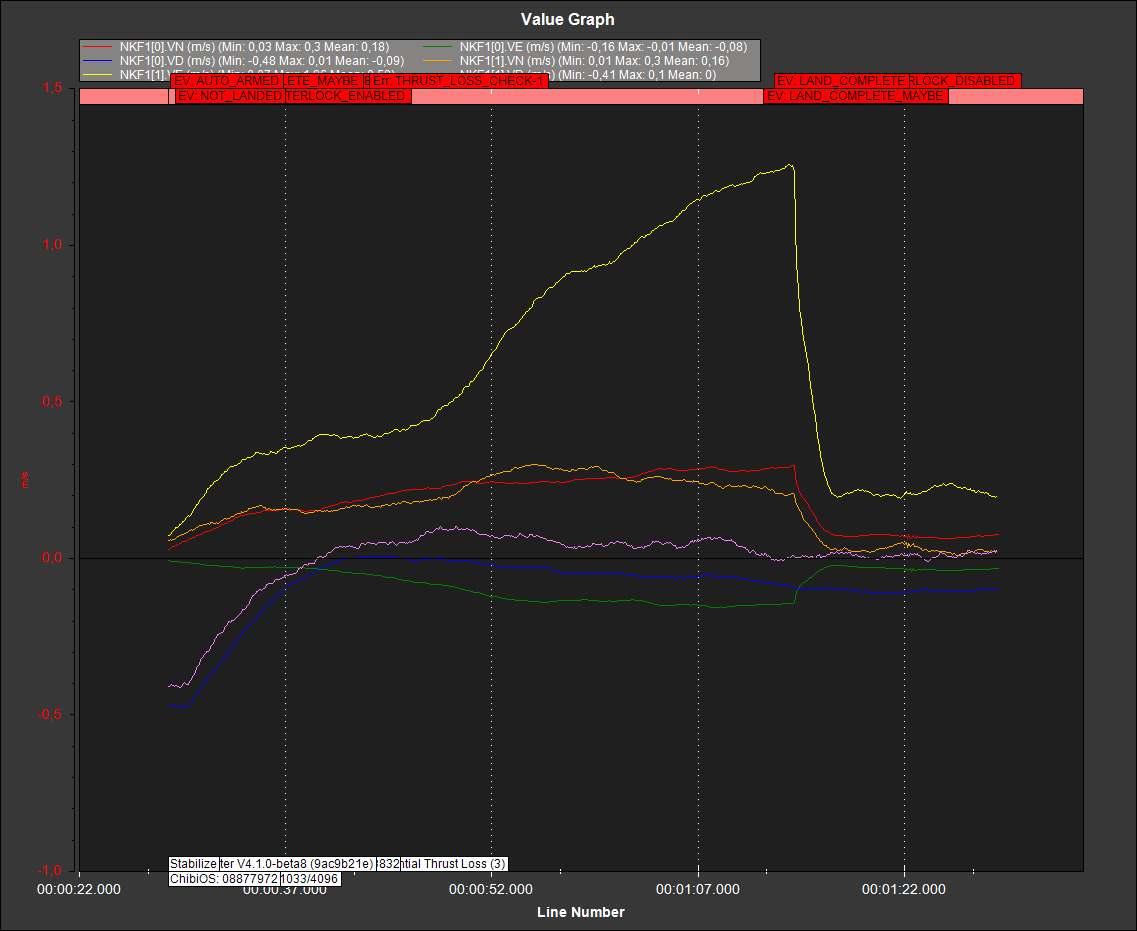
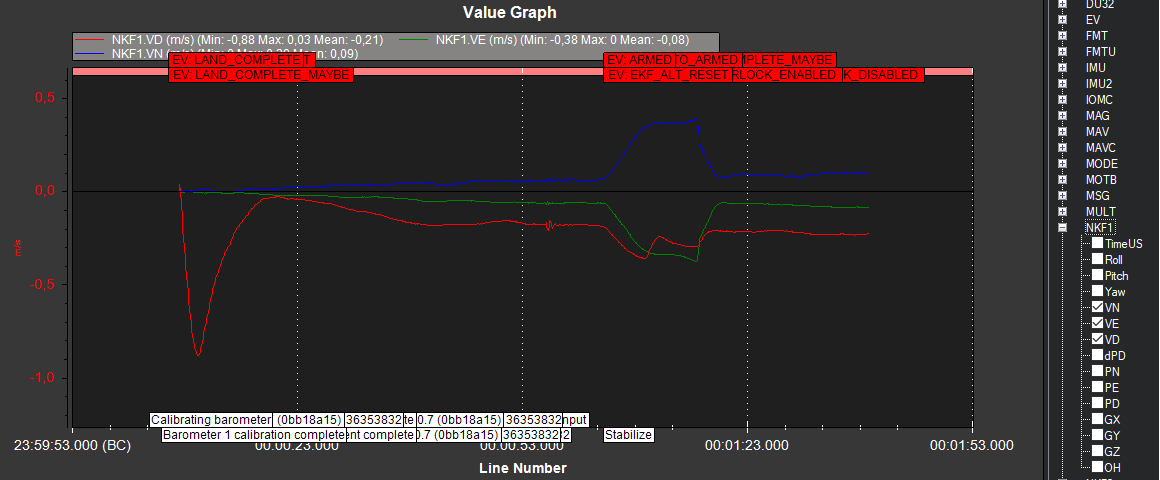
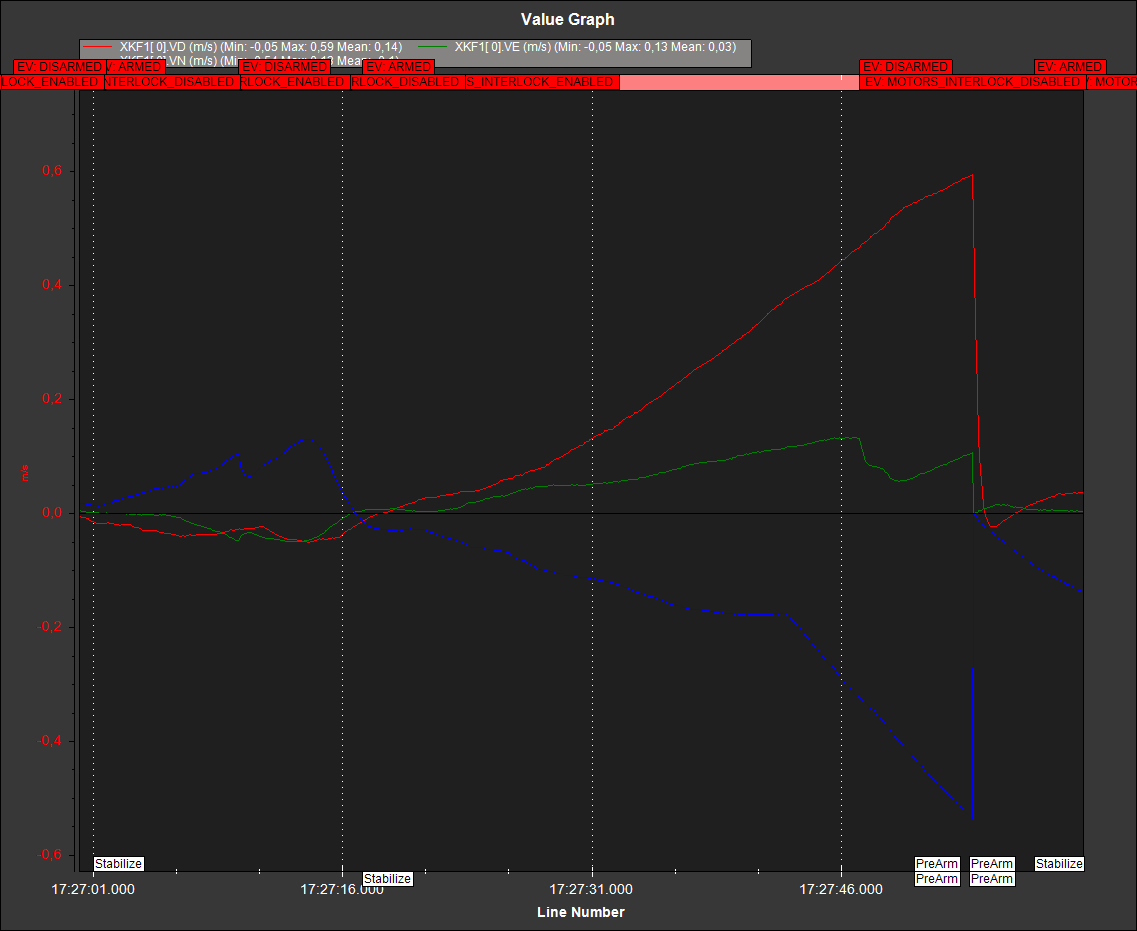
And what I think is the issue I’m referring to (value abruptly changing on arm/disarm):
And this is the video showing what happens after I try to download log files or even change mode:
 But thanks for your input.
But thanks for your input.