Same issue with errors during log download. I think mRo classic is 2.4.6 as well. Noticed a big lag in radio feedback when checking channels then it started to show movement.
@Quadzilla Ok: it sounds like it’s not us! Guess its; time to go back to the shop and play some more!
1 Like
Setting up a brand new Pixfalcon today with ChiRC2 and received the “PreArm: RCx minimum is greater than trim”.
Had to go through the parameters and set RCtrim manually to 1500 for all those channels to get rid of it.
I am also finding the external I2C channel will not drive anything.
I have an OLED display and RGB LED’s I usually put on the seperate I2C connection on the Pixfalcon.
The other is combined in with the GPS socket which I leave as is, so it only connects to the compass in the M8N.
Has anyone else had I2C issues with the new version?
Does this release require re-calibrating the ESC’s. On arming, motors reved up without any throttle input and was unable to disarm. If it does not require re-calibration will investigate further with initial settings. DYS BelHeli ESC’s being used.
Hi had the same issues with RC x min… changed them from the information above and able to fly… 12C seems to be working I have my GPS and usb-led connected. mRo pixhawk FC.
mRo v2.1 perfect flight in stabilize loiter is awful, I see a voltage jump when in GPS Please take a look if you can. Bin: https://www.dropbox.com/s/7jv55kb4wa9g7yf/2018-06-18%2020-06-06.log?dl=0
I have big problems with DYS XSD 30A v2 ESCs, after every calibration they seem to “discalibrate” randomly. Maybe you can try to add some real capacitors, someone recently posted great measurements of voltage spikes using oscilloscope. Or you can try DSHOT, it is supported on DYS ESCs. Personally, I gave up, these ESCs caused some real damage to my wallet already. Btw this is not issue of 3.6, I had problems with these ESCs on arducopter 3.5 as well.
I can recommend esc’s from Ready to fly quads. I use them and little bees.
HI,
i am not sure what gives - is it an issue or i messed up something again?
it flies ok now on rc2- but i have lost current reading - it seems to be showing now 0.3-0.4 value always as it refuses to accept multiplier? why? on 3.5.5 all that works fine…
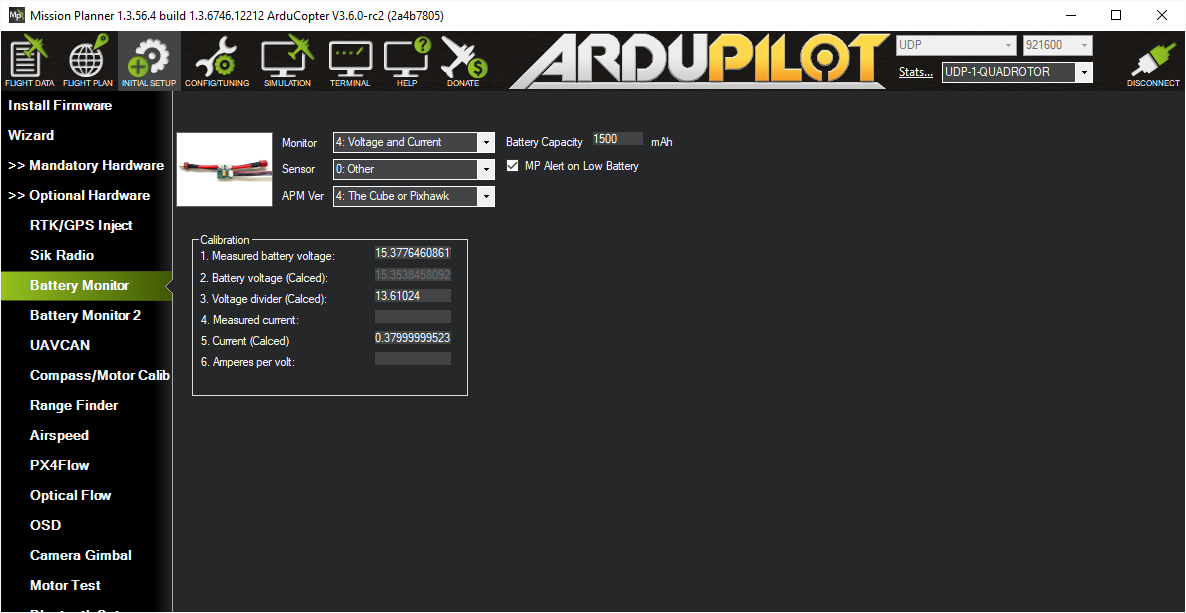
looking at params list this bat_amp_pervolt is set correctly to 36.3. but it does not show up in the MP and during flight statistic for current also stays at 0.3A which is obviously bogus.
Hi Paul, did you try using Mission Planner Beta?
it is a latest beta, from what it updated itself into. second screenshot shows its build number.
Again, i have all same params set as in 3.5.5.
Lua script during test flight was also showing wrong value, so i guess CURR computation itself is somehow broken, but, why?
I did some digging on the rc-1 page. here is a response a similar question: dkemxrDaveApr 29
“This is simply because the parameter name has changed in 3.6 and Mission Planner has not caught up. Functionally it’s still works as the values you had previous to updating were transferred. If you want to change this value do it from the Full Parameter List BATT_AMP_PERVLT (note the change?)”
how could I solve this?

Randy !
My helicopter T-rex500 uses the Pix+FBL mode, which works well on the 3.6rc1, and is a great Loiter. However, when I brushed the firmware to 3.6rc2, no parameters were changed, and the helicopter’s total distance became very small, almost 2-5 degrees, and it was about 12 degrees before! Moreover, I tried to change H_col_max, but did not improve, still a small total mechanical distance.
Yes, that parameter was set in my setup. I see it now - looked at logs again, for reasons that are difficult to comprehend what used to be section CURR in logs is now named BAT, and it has Volt and Curr tags in it. MP is not aware of any of that so it does not show nothing.
It also screwed up FRSky telemetry outputs mappings, it looks like, as yaapu9 lua script now gets garbage instead of proper Curr value, but somehow still gets proper voltage. I will try to look at it tomorrow, if it is something easy enough to fix or not, for new taranis it is a PITA to deal with those scripts and pre-compile them into libraries…
Confirm that the problem is indeed 3.6rc2 FW, I brush back to 3.6dev on April 22, 2018, without modifying any parameters, the maximum helicopter distance is normal! This suggested developers are looking for where the problem lies.
…when I brushed the firmware to 3.6rc2, no parameters were changed, and the helicopter’s total distance became very small, almost 2-5 degrees, and it was about 12 degrees before!
… the maximum helicopter distance is normal!
What kind of distance do you talk about?? collective pitch? or what?
Please post your parameter file. If I had to guess, I’d say your swashplate servo trims were not close to 1500. The change that took place in 3.6-rc2 corrected an issue with the swashplate servos that keeps their max travel the same regardless of where the trim is. I could see that on one side your cyclic would decrease significantly if you originally set your cyclic based on that side. However now your cyclic be equal on both sides regardless of where your trim values are (as long as you aren’t hitting servo limits).
About collective pitch !