I had problems similar to this, setting INS_ACCEL_FILTER and PSC_ACCELZ_FILTER to higher values fixed it for me (I am using 40). It could also be a baro problen, but I guess if 3.5.7 works fine then maybe not.
Hey All,
I noticed this weird interaction in my Pixhack v3 running 3.6.0-rc12, where it seems to be overheating, or something cause after a flight, i touched it and it was so hot, it almost burned my finger. Is that normal? Or am i just being weird?
Many thx
I have INS_ACCEL_FILTER = 20 and PSC_ACCZ_FILT= 20 I will try to set it to 40
Regards
Hey all,
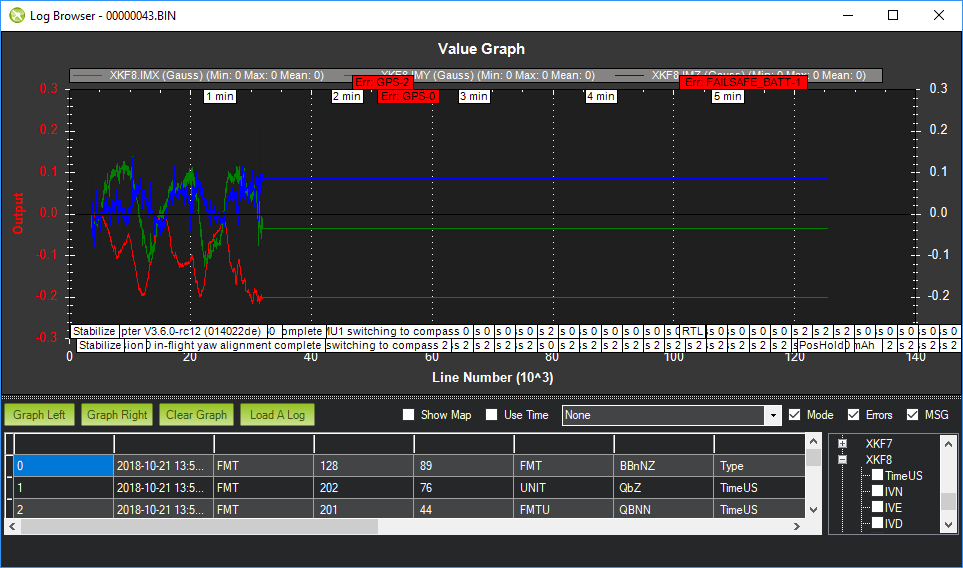
The logs for the above question I had
When seeing the logs, i noticed it increases temperature sharply when changing modes, and it is at 80deg Celsius.
If anyone could help.
I have a question.
Might be something I simply never noticed before…but thought I would ask.
so I have my new build on the bench. Transmitter is powered off.
I plug a battery into the quad and I hear mission planner express the different calibrations and such as the machine readies itself.
Finally is says Pre Arm Hardware Safety Switch…wait a minute my tx is still off. Should it not be concerned there is no RC in. It does say throttle below failsafe. If I hit the safety switch it all messages clear and I am ready to go…well sort of…the tx is off so it’s not going to arm.
Oh and the other odd thing is I have a Solid green status led…which the literature says is your good to go GPS acquired. No way that is right, I am in the basement with an hdop of 100.
Is this normal…is it just that i never noticed before
It’s a quirk. Until we see an RC receiver we don’t ever consider it
“bad” for the purposes of the SYS_STATUS mavlink message. This is on
purpose - possibly for RC-less flying (which some people do, relying on
channel-overrides or simply using guided modes.
Looked at the log. The temperature “jumps” because the log is not being recorded while the drone is disarmed, but the temperature keeps increasing. In the Mission Planner log viewer, you can use the “Use Time” checkbox to see that the temperature just increases slowly the whole time, even while disarmed.
I am not familiar with the Pixhack, but certainly 80C is too hot. Is it exposed to direct sunlight? Does it still heat up a lot if you leave it inside?
1 Like
Thanks Peter Baker…that makes sense.
The only thing then that I am confused about is the LED colour then, but perhaps thats a change thats not been documented yet. Things change so fast around here it’s hard to keep track.
Hey Rick,
Alright thanks for the answer. There is a canopy which covers it from direct sunlight. It does not heat up too inside. Only during flight.
Thats why I had the doubt.
chibiOS r-12 loaded on my Octo I noticed that the error sound did not give the negative tone when trying to arm before the arming switch was engaged… rock steady GPS loiter will test more…
Thanks for all the hard work guys.

Re-calibrated my compasses and re-did compass MOT. Switched to EKF3. Flew a few batteries - the most interesting one is here:
Some weirdness:
- During compass calibration I have COMPASS_OFFS_MAX set to 1500 to allow me to calibrate the external, but this results in the offsets for the first Pixracer compass to be virtually random - especially in the Z axis. I have calibration values from 350 to 1300 - surely something weird is going on? I turned it off because of this.
- In the log and during flight I got the error “BUFFER FULL - RTL DISABLED”, or something similar - what is this all about?
Some questions:
- There is GPS glitch in the logs, but accuracy looks ok. Can I tune down the sensitivity on this somehow?
- I am getting a RADIO failsafe, even though the copter is only 100m away. I am using a lemon diversity receiver, thought it would be a lot better than that. Could it be the mounting? I have threaded the two whiskers along the back arms with the wire protruding. It’s a carbon-fiber frame.
- At close to max throttle the current drain is enormous and the voltage sag huge on 45C 1300mah batteries. Any recommendations for different batteries? The mag interference is also huge, but not sure what I can do about that.
Other than that flying ok - so thanks all!
Buffer Full is about smart RTL. It remembers some number of points to get you back home… Regular RTL would still work.
1 Like
All in all my 3.6 RC12 ChibiOS is doing good, still have few issues unresolved, i post them here to the attention of devs.
-
System doesn’t start magnetometers if sbus receiver is plugged in (doesn’t start I2C magnetometers as well as UAVCAN magnetometers.
-
System every 10 boots or so doesn’t start pwm to ESCs
-
Every once in a while system goes in imu1 switching magnetometers continuously.
regards,
Corrado
I’m getting this a lot, the first instance of EKF is fine on the external compass, the second instance is having all kinds of trouble:
The innovations don’t look too bad and then suddenly they stop and the EKF just switches back and forth between the compasses - almost like it’s looking for a signal but not finding it. Seems weird to me.
gps glitch means gps receiver suffers from external interference. wrap all possible sources of interference with copper foil, ground it. put a layer of foil under CF plate under the gps. wrap in foil signal wires that go to GPS or - better - use a coax or shielded cable for gps signal and power.
it gets really annoying with those gps receivers on small drones. worst source of issues is a runcam split 2 board - you can see how it jumps from 15-17 sats down to literally 8 without proper grounding as soon as split board is turned on. with shielding and grounding the best i got it was to about of 12-13 now from 18-19 sats with split not on.
battery wise i do not know what you use - my rooster in stab mode full throttle uses close to or a bit more than 100A. it sags battery crazy.
the kind i use and i think is the current best is this:
i do not advice to buy it from the original chinahobbyline site - i bought one set from there while they had a sale a month ago and still do not see anything - they sent a fake shipping number but nothing is there and do not respond to emails. racedayquads never had a problem. there is also a 1300mah 100c lipo but i prefer 1500mah ones. they are very good. i get 10min of loiter at 8A current on a rooster.
for mag interference - pls post a picture of your drone - where is the gps puck related to the motors and esc? i just made a small 3" model based on owl frame - and it is fine, max mag interference i saw was close to 70% in stab mode max current - 46A. (not sure why max A are so low on the Owl - it is a different issue), at loiter mag interference is within norm at 21% or less.
always show “gyro still setting” when reset board.
Paul, re COMPASS_LEARN = 2 (EKF Learning), the EKF can apparently learns the compass offsets in flight and it always does this learning actually. If COMPASS_LEARN is set to “2” then those offsets are saved once the vehicle is disarmed.
OlliW,
Thanks for the reminders on the issues with the Mount code. This must be the issue re mavlink messages being handled incorrectly in 3.6. I’m particularly concerned about any regressions. It sounds like this issue doesn’t actually cause problems with the physical movement of the gimbal? I guess it’s the SToRM32 gimbal we are talking about.
@Jonathan_Blumenfeld, thanks for the report on the telemetry issues on the Matek405CTR, I’ve added it to this issue so that it’s not forgotten. It’s possible that we may not fix the issue before the official copter-3.6.0 release but hopefully in a follow up point release.
1 Like
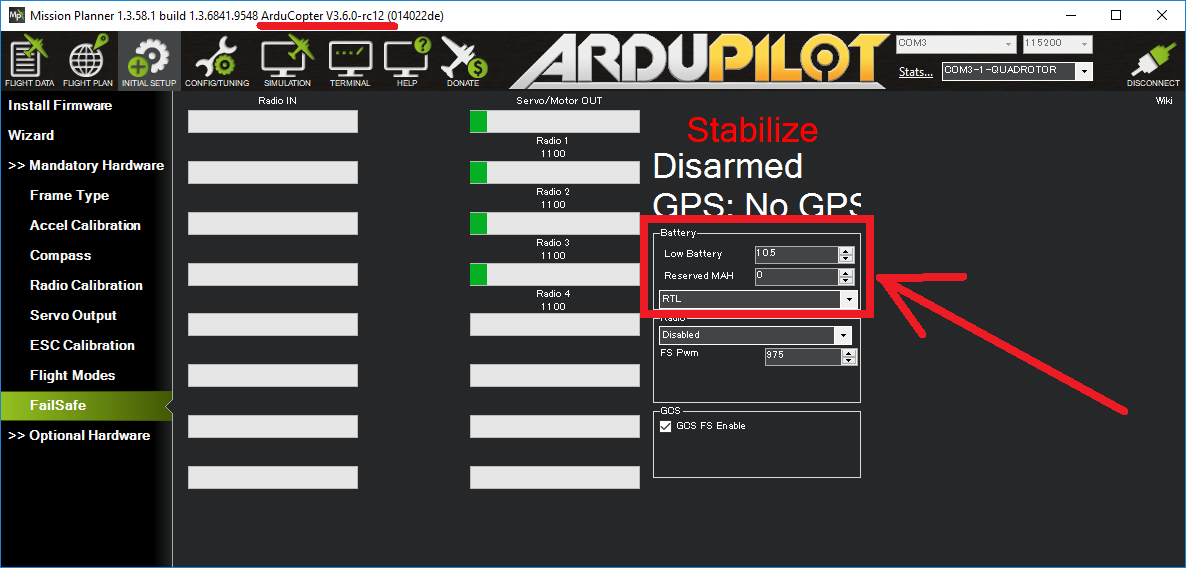
@FMOliveira, txs for the report on the MP’s not showing the BATT_FS. I’ve just double checked and I think MP is working, perhaps it’s been fixed in the 8days since you made this report? … or more likely it’s only fixed in the beta version of MP.