I need to have ability to continue mission (AUTO flight mode) on RC loss but failsafe should still work while not in mission (AUTO flight mode)
How I can set it up?
I need to have ability to continue mission (AUTO flight mode) on RC loss but failsafe should still work while not in mission (AUTO flight mode)
How I can set it up?
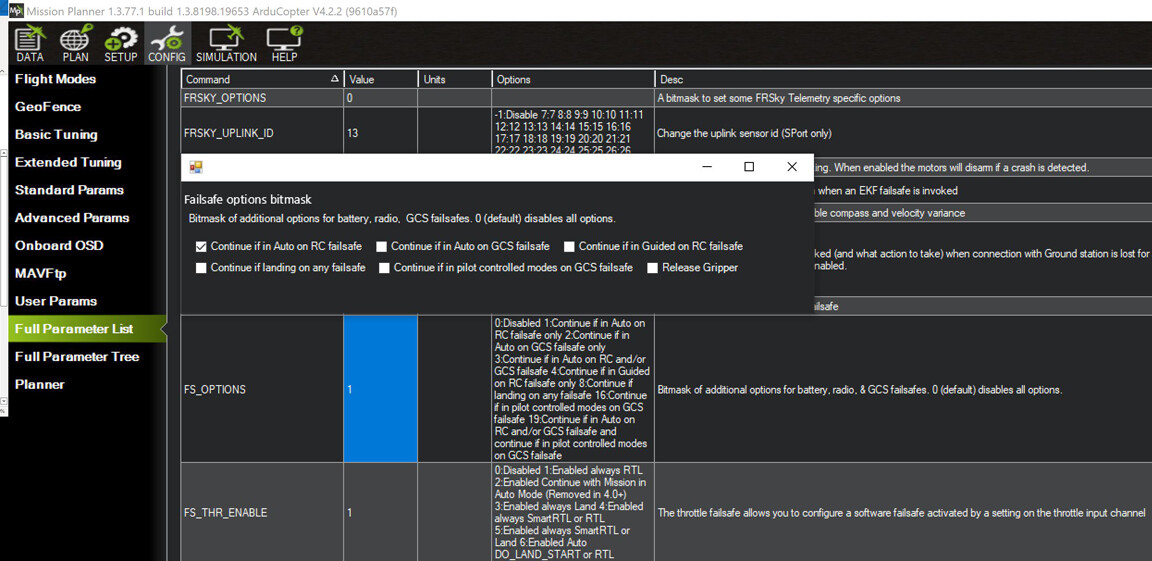
Very simple. Set FS_THR_ENABLE to the response you want (typically RTL) and set the FS_OPTIONS bitmask to the conditions.
@dkemxr I am having a similar issue running AC4.2.2
I have set the systems up as advised with:
FS_THR_ENABLE = 1
FS_OPTION = 1
The issue being that I have now lost my pre-arm check for the RC receiver to be turned on.
ARMING_CHECKS = 1 (All) but the lights on the GPS go straight through to green and no pre-arm warning on Mission Planner to say that the controller is not turned on.
Thoughts?
Interesting that you’ve mentioned this.
I’m currently “playing around” with copter latest and my new Pixhawk 6x.
I also noticed that the pre-arm for my RC is no longer being reported despite transmitter being off.
…I just just blamed the lack of support for the 6x at this time of development.
On bootup if there is no RC transmitter turned on then I don’t get any warning, but if I then turn the transmitter on and off again, then the warning comes back like it used to.
I have had a look through the release notes but I can’t see anything that would effect this.
Exactly how I experience it.
…Interesting thing is was using Navio2 FC until recently and it was working with copter 4.2.2.
What FC have you got? - This may be important to developers.
Running on a Cube Orange. I will try back dating the firmware and see if I can pick exactly where the change came from, whether that’s AC4.2.0, 4.2.1 or only in 4.2.2.
Can confirm that the issue is present on both AC4.2.1 and 4.2.2