We have a weird problem on one of our UAVs with original 3rd Pixhaw. and Arduplane 3.7.
The plane has perfect flight characteristics. Does everything as is supposed to. No problem with climb rate what so ever.
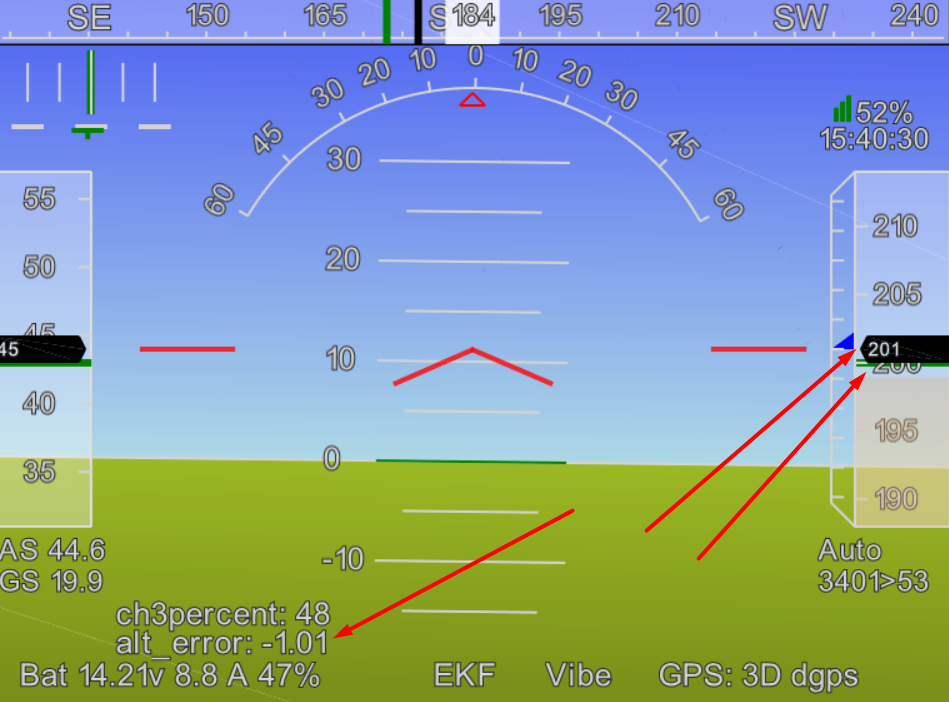
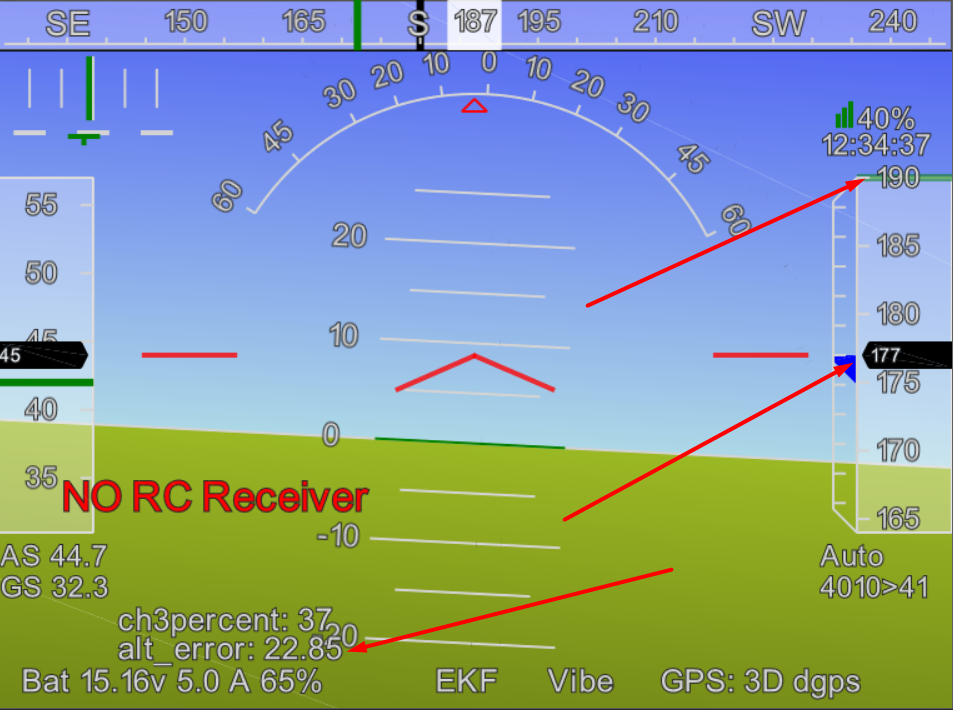
Every other mission we fly (back to back) the UAV would do everything normally. Take off is excellent. However when it get to first mission waypoint for mapping (say 200m AGL), it stays at 180m. This is not baro drift. It actually shows and know that the target altitude is higher. Both parameter Alt error shows the difference and also on the mission planner virtual HUD it show the current altitude as 180 and the target as 200, but just keeps flying at that level in the entirety of the 1-2 hours mission. Then to make things more weird, the difference also starts to increase over time up to 34m (from 16m at start). All the way into the auto landing, which of course result in very premature touchdown.
So again, not UAV character, not battery, not barometer, but in all actuality as if the AP intentionally is offsetting the from mission wayppoints. As if it was some kid of software bug. Mission tell is to fly at 200m then it flies at 180 and reports 180 and reports that the target is 200, but does not try to get to 200.
Same thing at lading approach waypoint, mission 30m, target 30m reality 5 meters, reported 5meters.
Someone please help me, we don’t even know where to look  It makes no sense.
It makes no sense.
No, there is no terrain follow or absolute altitude active. The problem in only consistent on every other mission. That is if we fly 4 mission a day then 2 would be fine and 2 would be like this. Same site, same everything.
I will try to provide dataflash logs, for now I only have tlogs. Till then if anyone has any pointers where to look for a reason, please do not hesistate.