@bnsgeyer
@ZvikaF
@FRED_GOEDDERT
@Ferrosan
@zhangsir
Hello, I am back again.
In the last few weeks I have removed the VARIO mechanics from my Bell 230. I think the previous owner made a lot of mistakes when assembling the fuselage, so the cursing to the tail rotor gear was never right.
I also replaced the soft VARIO rotor head with a stiff rotor head from Sitar.
In the future I would like to install the mechanics in an “old” Graupner fuselage (Agusta 119 Koala) with a fuselage length of about 2 meters.
For this I had to extend the tail tube accordingly.
But before I install the mechanics in the fuselage, I want to fly it in a trainer version and adjust it.
Building this trainer has been my occupation for the last few weeks. I also changed the mechanics from a 4-point 90 degree linkage to a 3-point 120 degree linkage and mounted the stiff Sitar head.
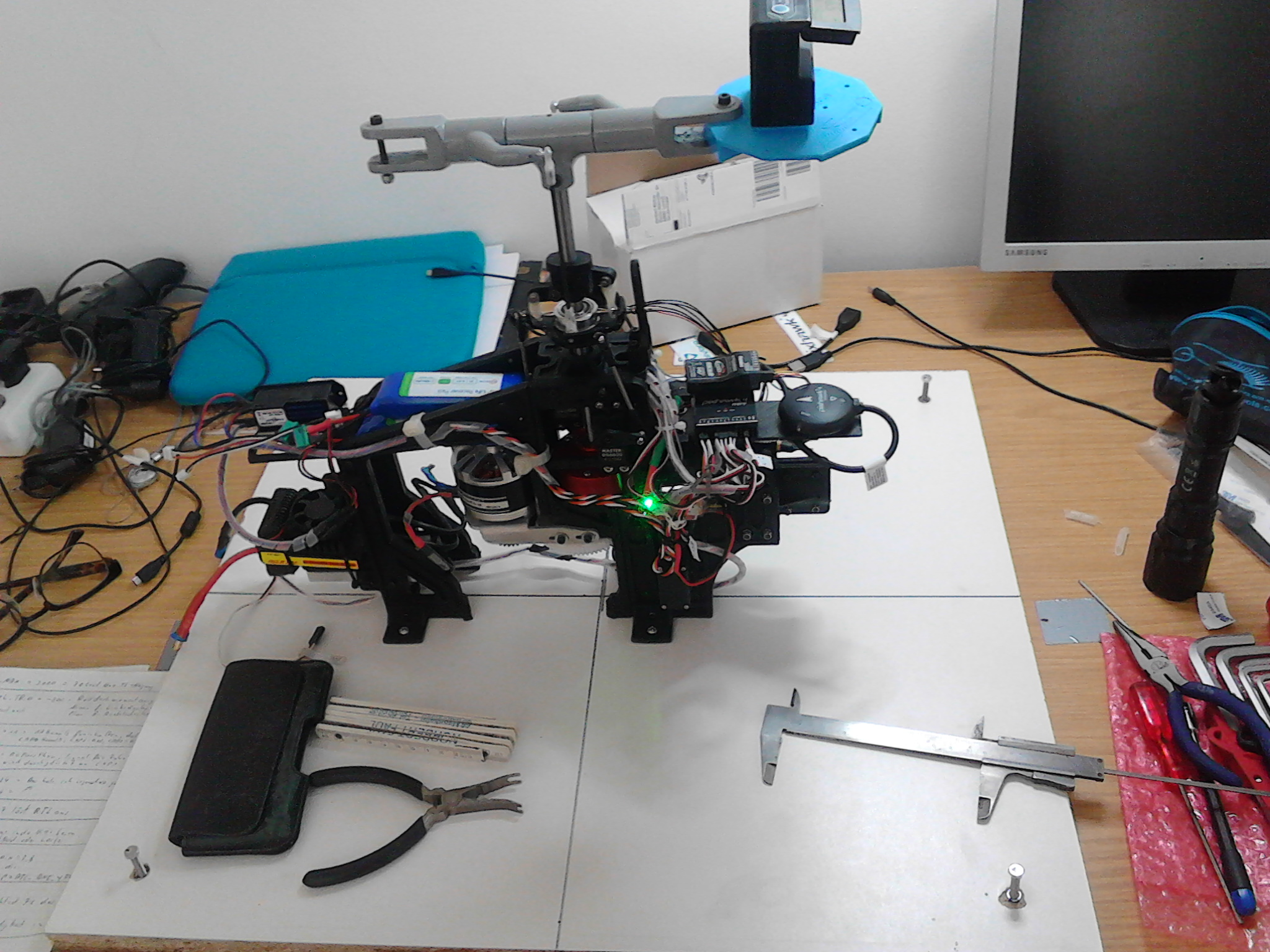
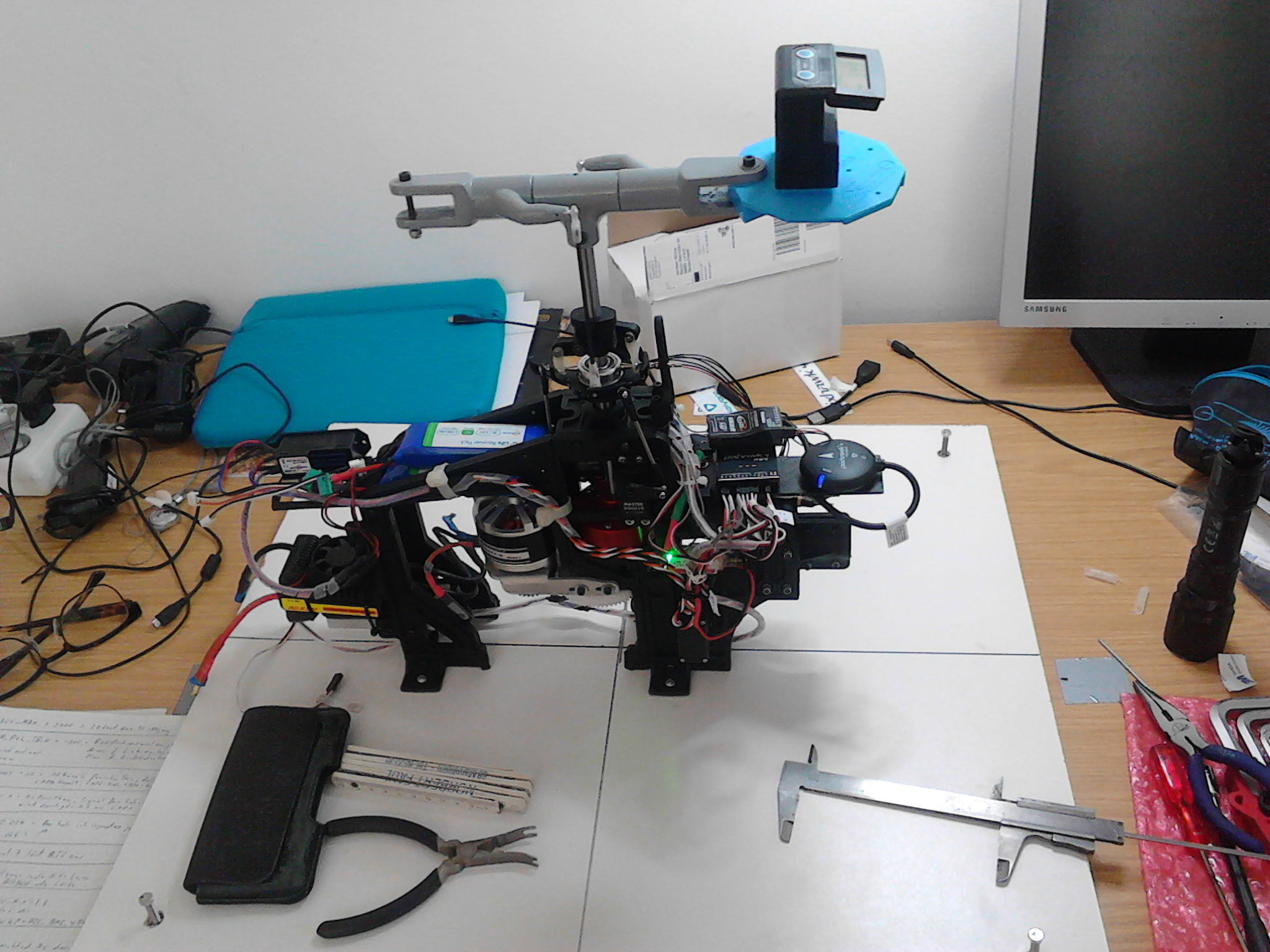
For leveling the swashplate I screwed the mechanics on an adjustment aid. This white wooden board has four screws in each corner. This allows the mechanics to be aligned exactly level. For this I use the SOKO-Heli-Tuning, you probably know it. In addition, I have also used the vario setting gauge.
When I move the swashplate from the very bottom to the very top, I have a maximum orbital deviation of one tenth of a degree. I think that is very accurate.
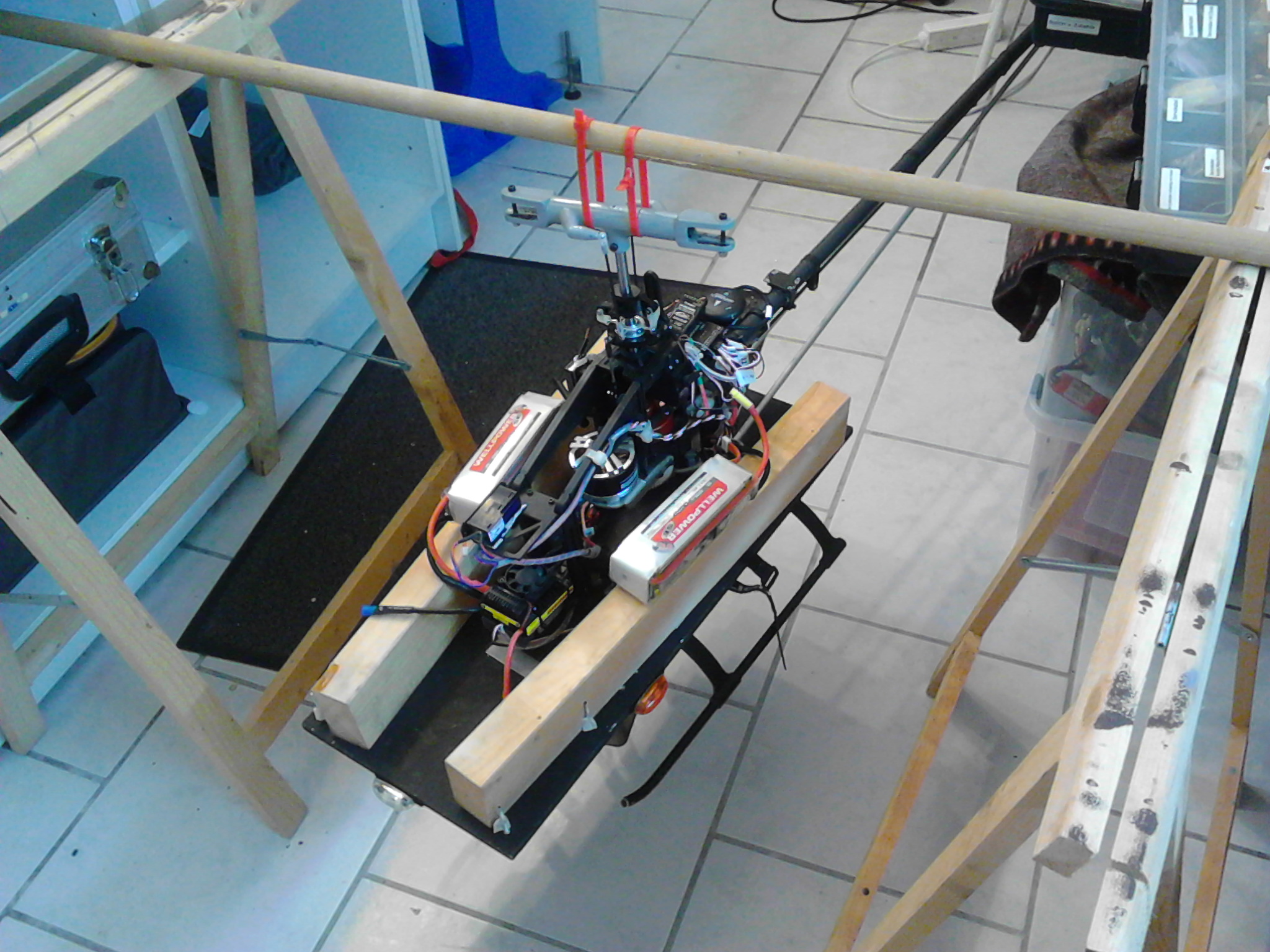
Using this method, I leveled the swashplate and set min, max and zero position. I also leveled the horizon in the FC. After that I screwed the mechanics on a wooden trestle, which simulates the weight of the fuselage. The extended tail tube was mounted and the tail adjusted accordingly.
I adjusted the center of gravity of the trainer chassis as follows: I suspended the helicopter from the rotor head. See photo. And moved the wooden weights and the batteries until the horizon indication in the Mission Planner was exactly right. Accordingly, the wooden weights were mounted under the helicopter and the position of the batteries was marked. After that everything was checked again.
I adjusted the “Harmonic Notch Filter” as Bill recommended.
With this I made two test flights. The first test flight was on a windless day, the second test flight was on a windy day.
During the first test flight I had visible vibrations on the tail. I changed the tail tube support and replaced the wobbly plastic side fin (original from VARIO) with a stiff aluminum side fin. I also mounted longer tail rotor blades. On the first test flight I had 120mm Helitec blades (semisymmetrical) mounted. For the second test flight I changed to symmetrical 130mm blades from Sitar.
On the second test flight, the visible vibrations on the tail were now gone or no longer visible to the naked eye.
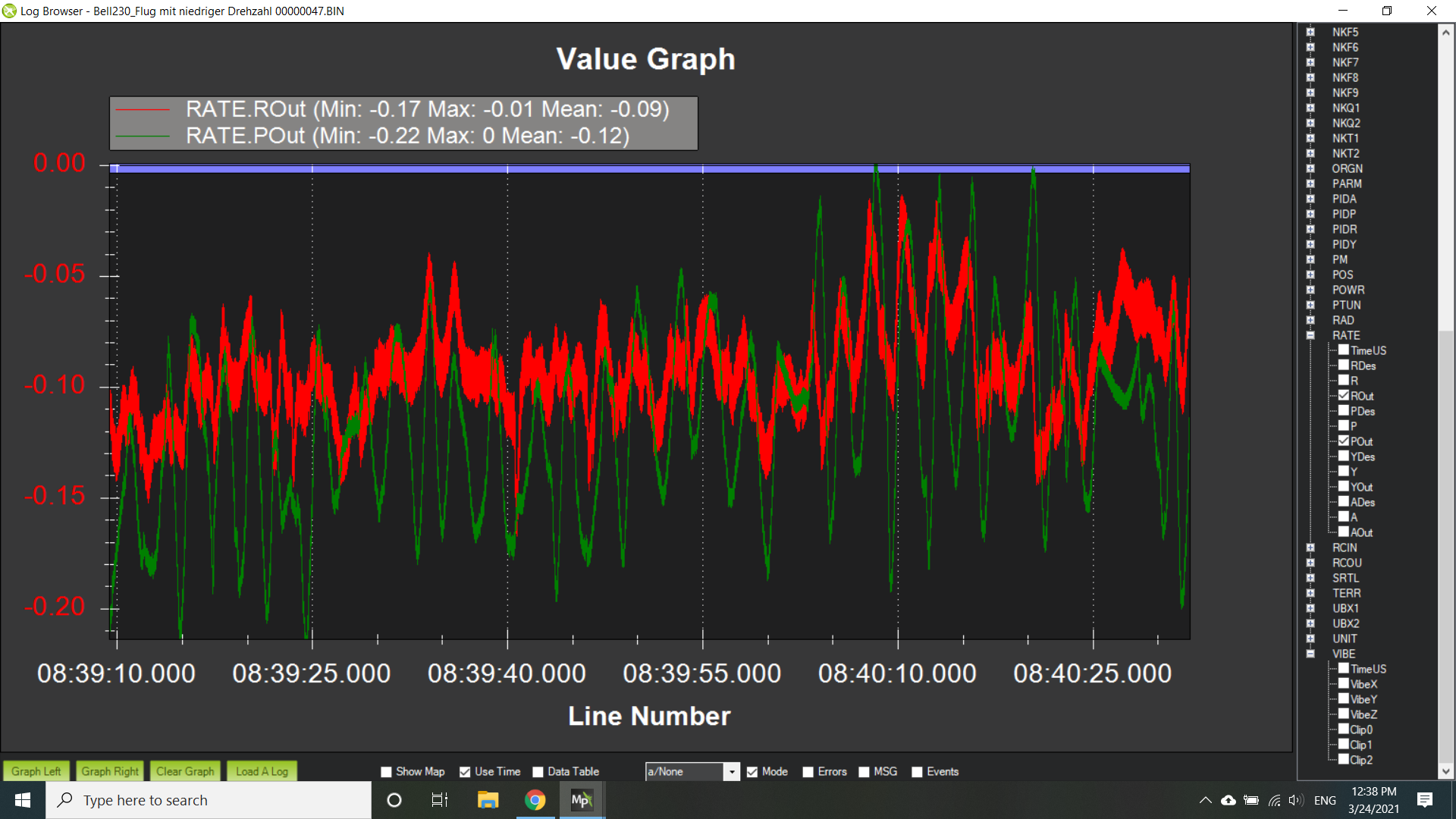
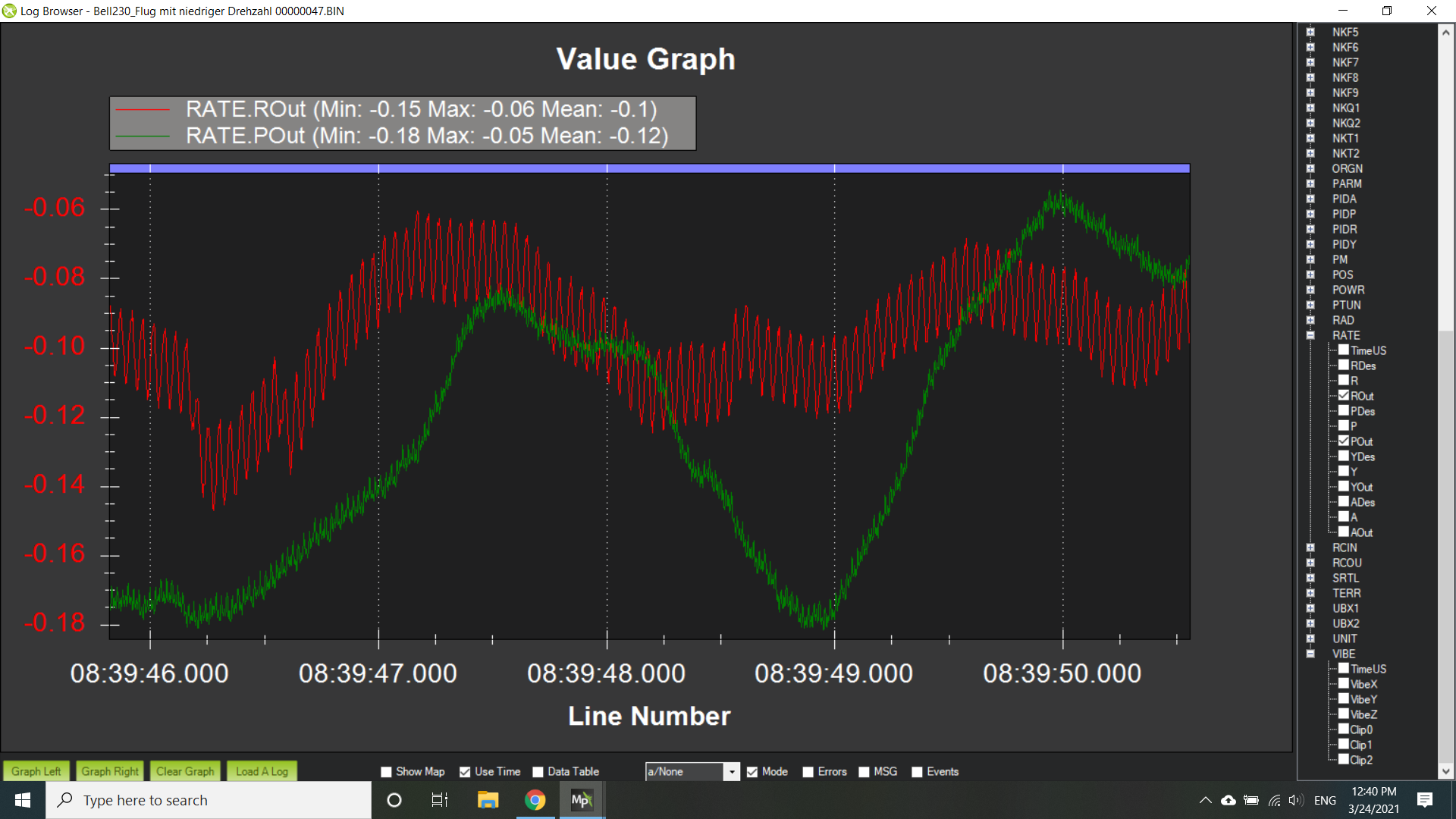
However, I did not get the tail to settle down. It kept bouncing from side to side.
I activated the parameter ATC_ANG_YAW_P for tuning and put it on a control knob. With this, I did not get the tail to settle properly.
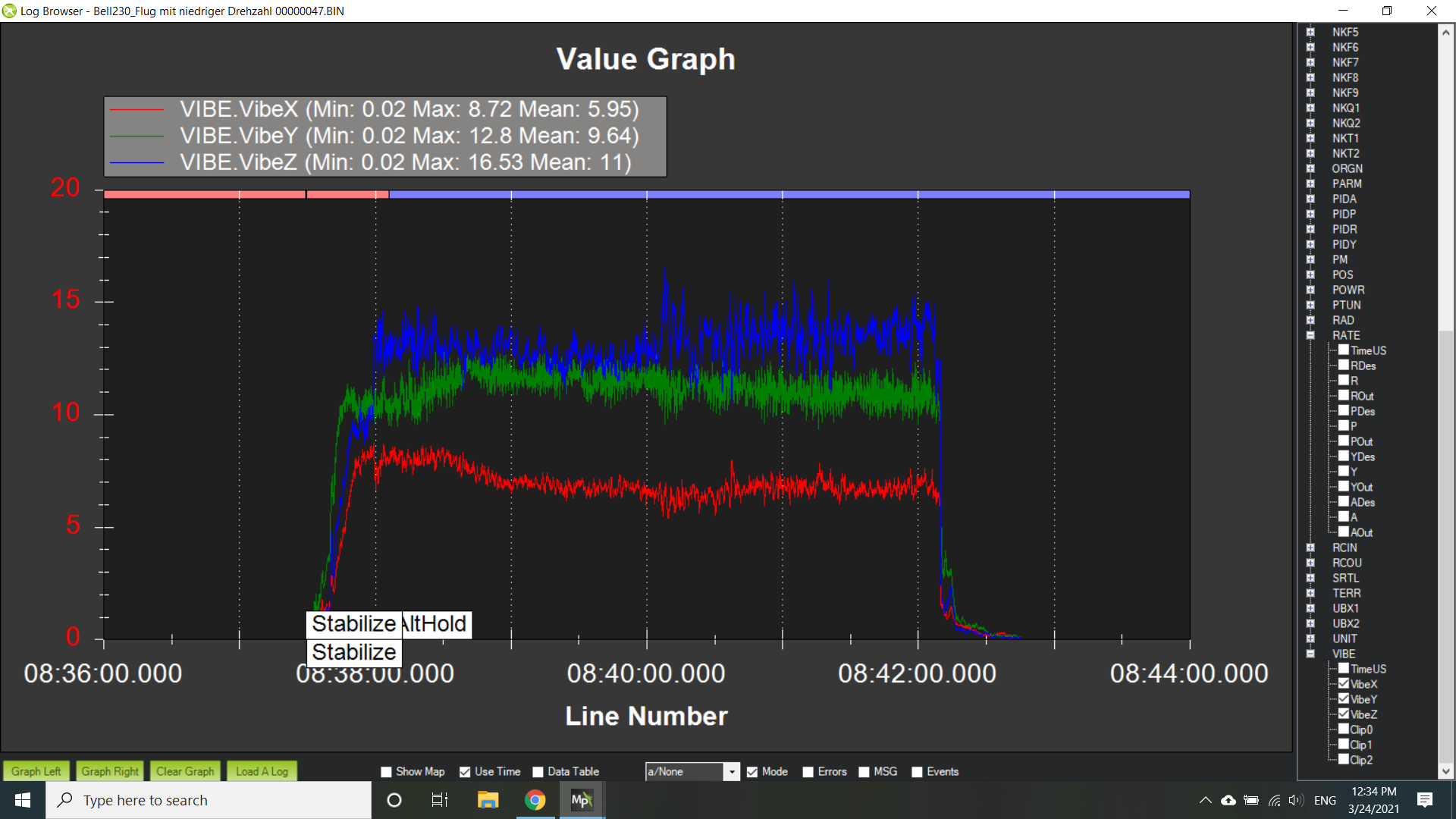
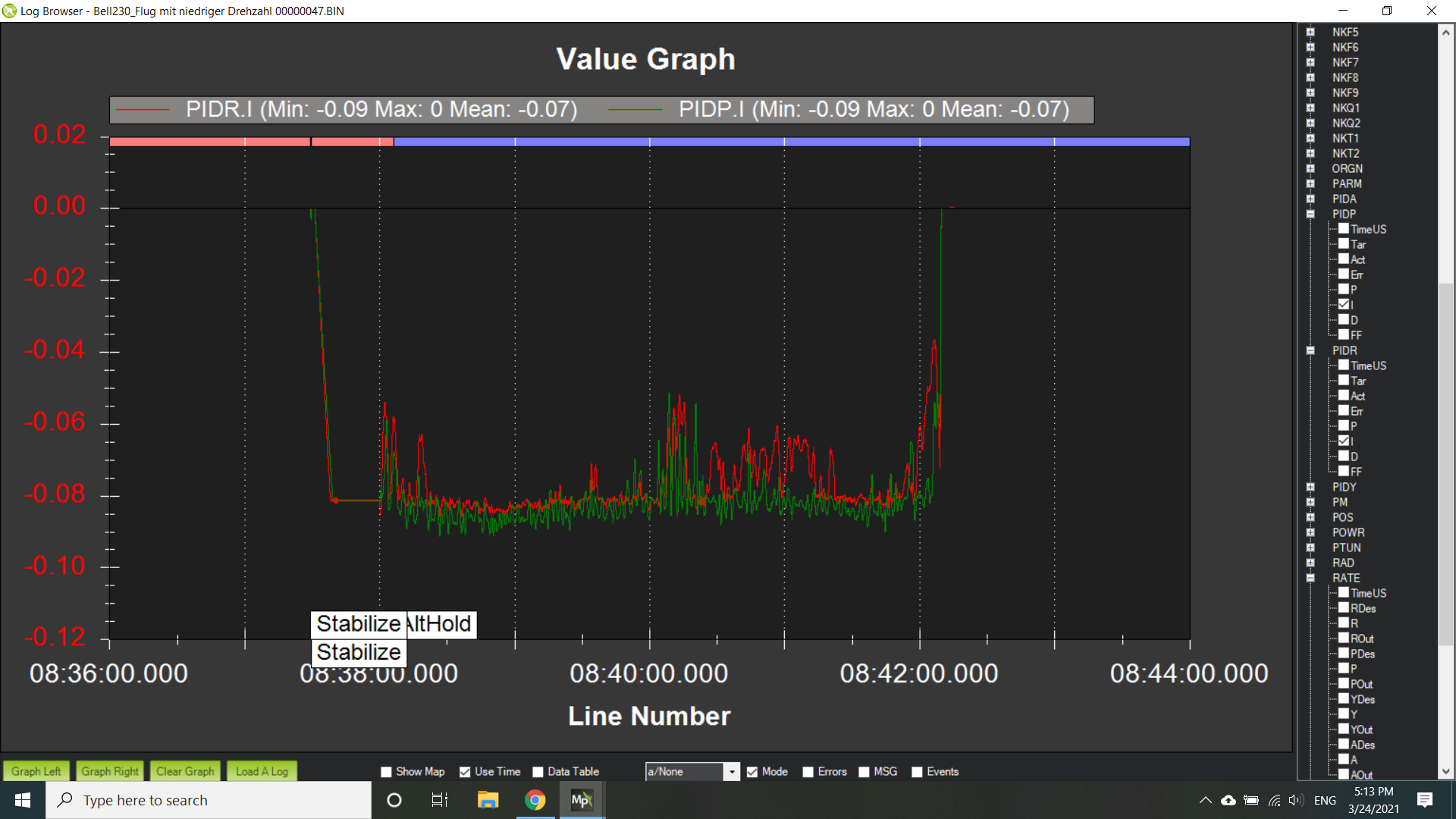
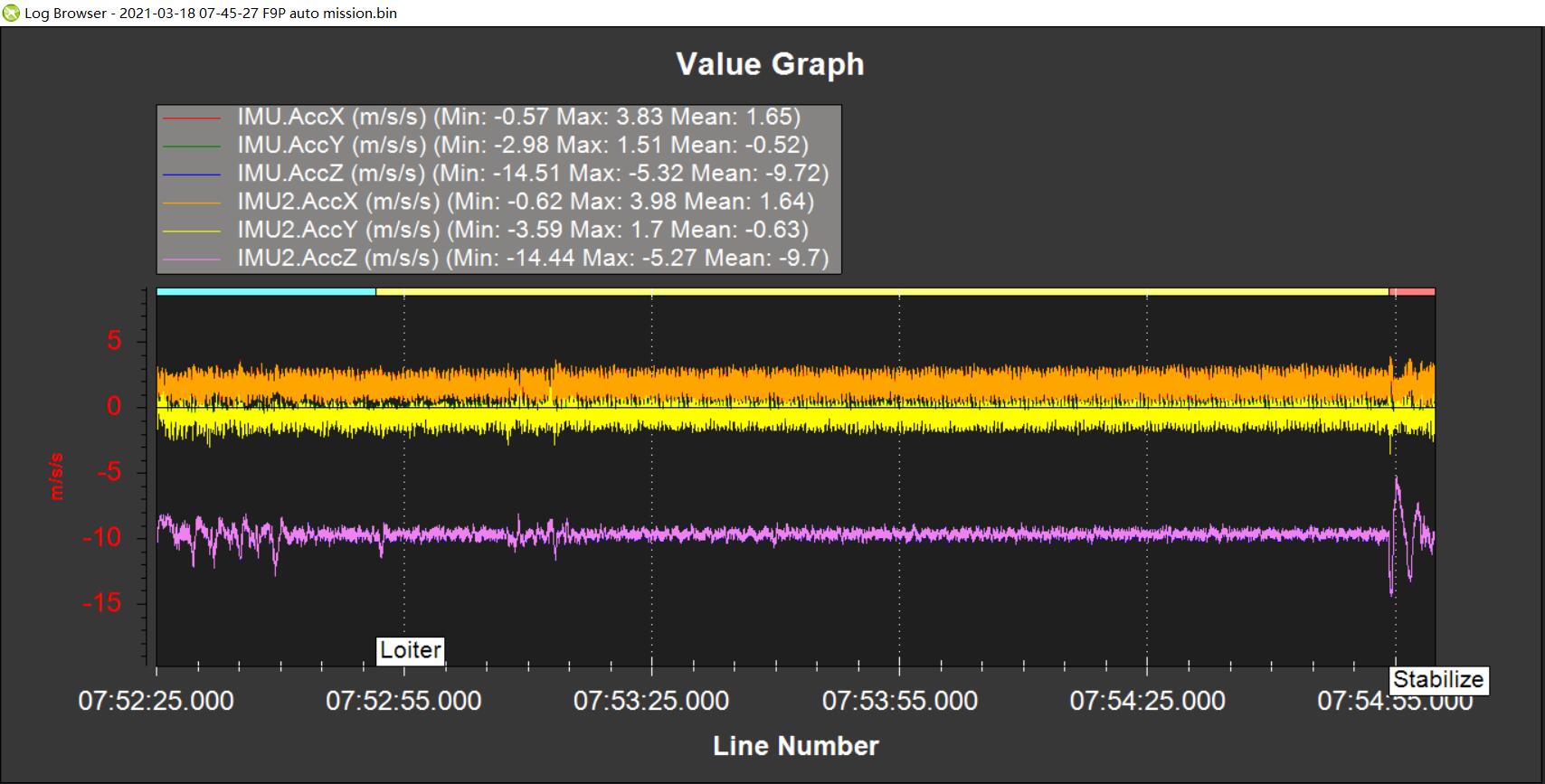
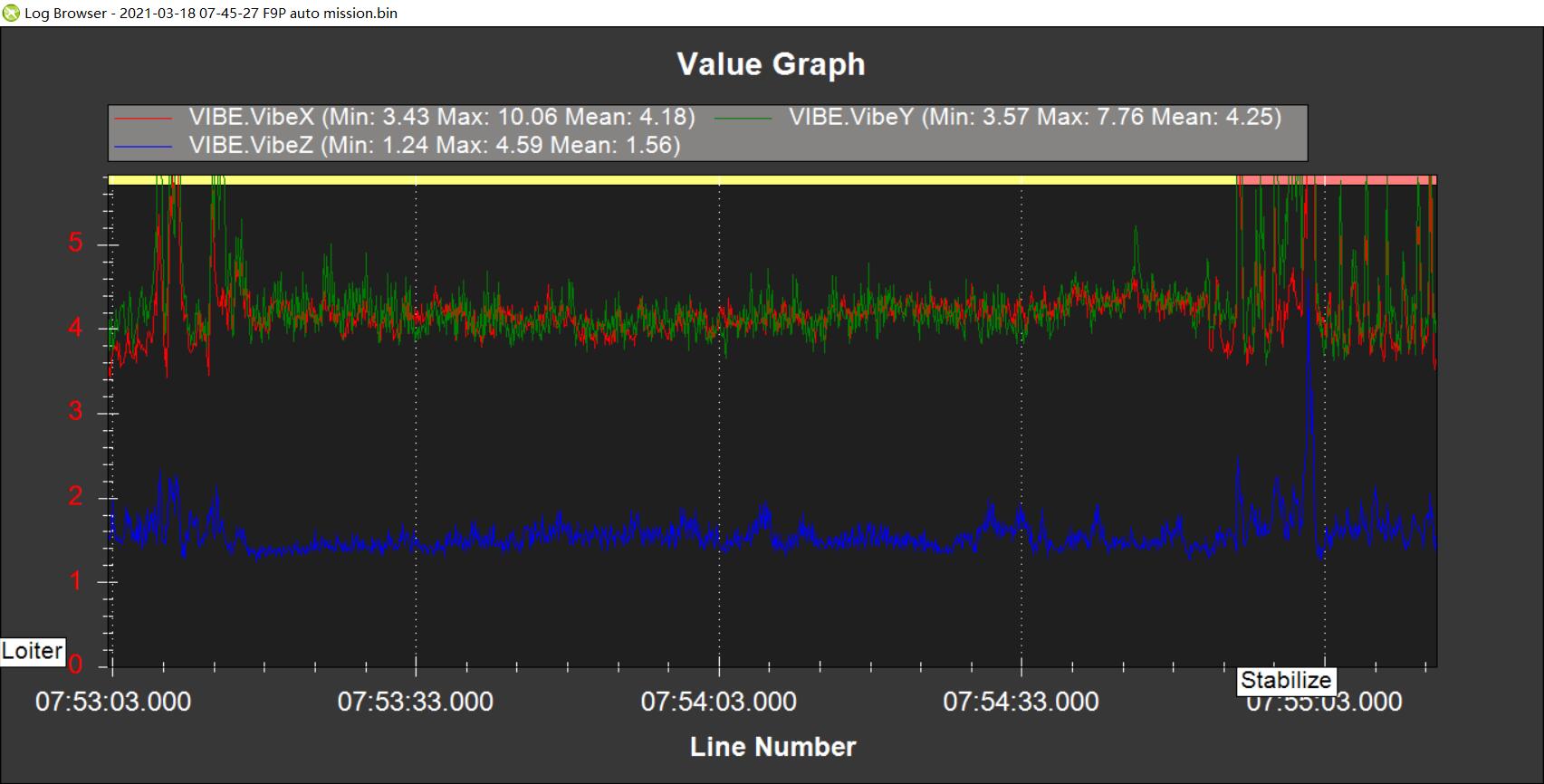
I have already looked at the log data from both flights. I think the vibrations have dropped considerably since I rebuilt the mechanics. The swashplate should be mechanically spot on now. With the tail I am now undecided whether I have a mechanical problem or a control problem.
Previously, the tail was hinged via a Bowden cable. Now it is hinged via a carbon fiber rod. Should therefore actually be much more precise?
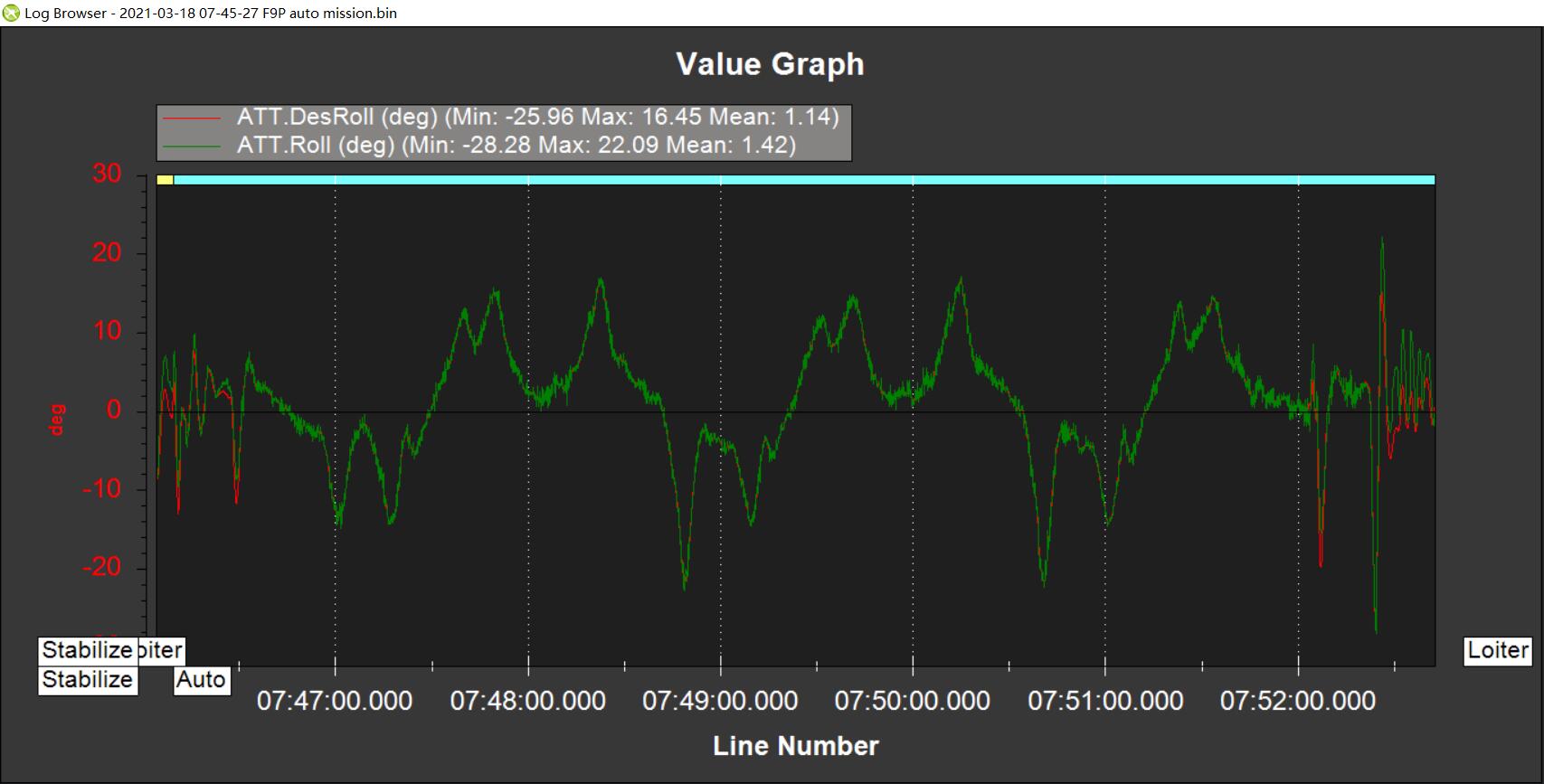
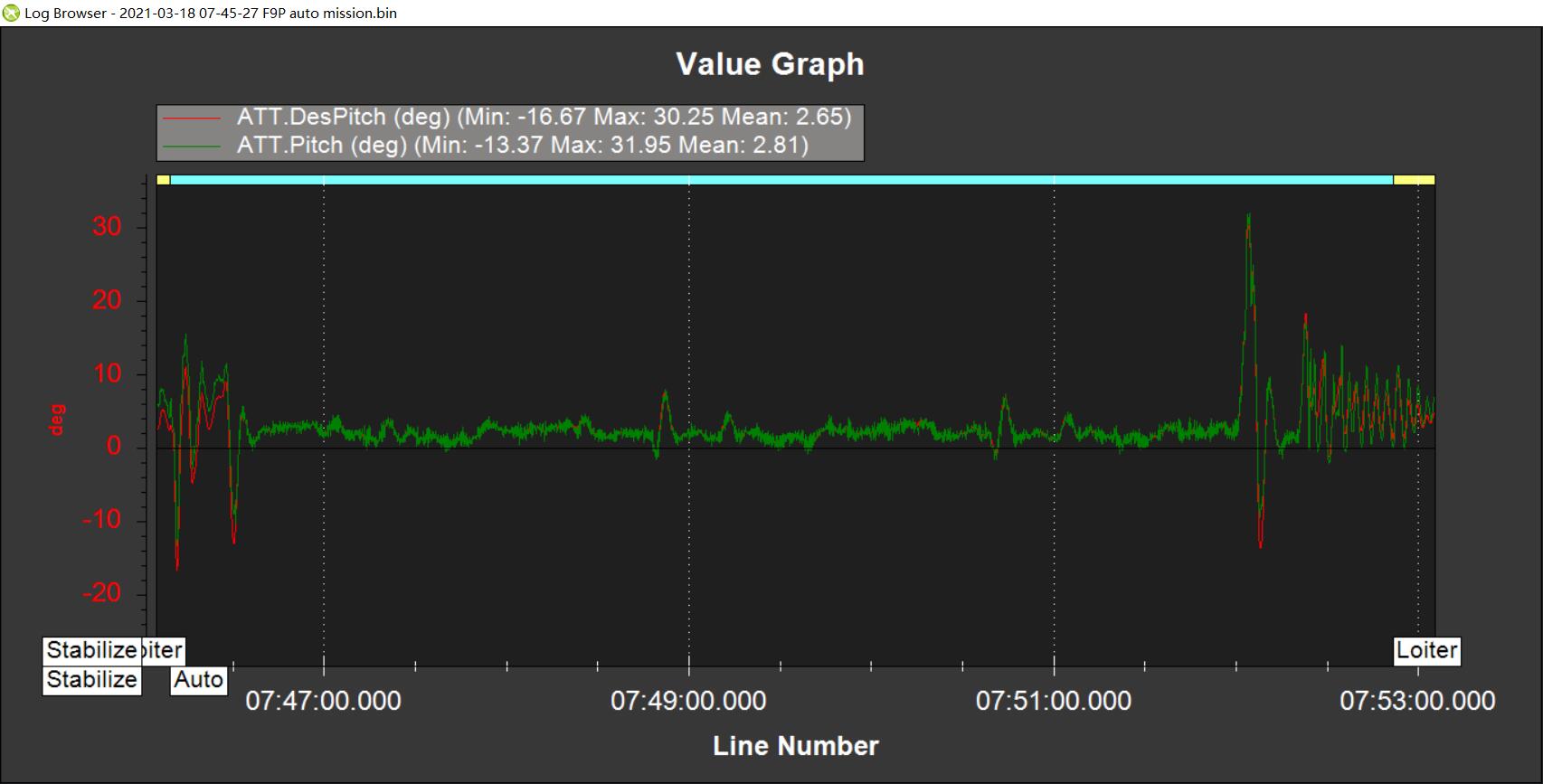
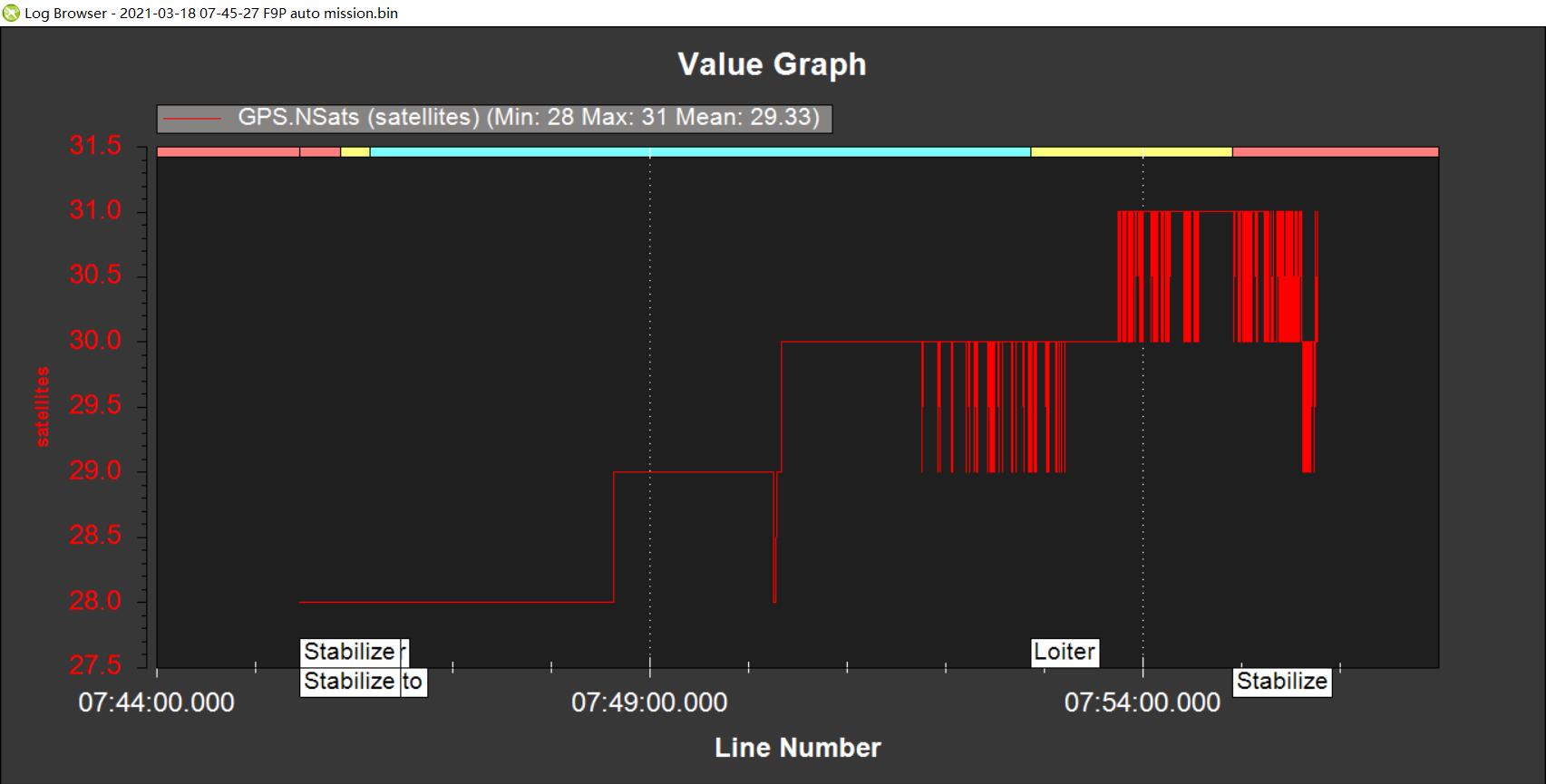
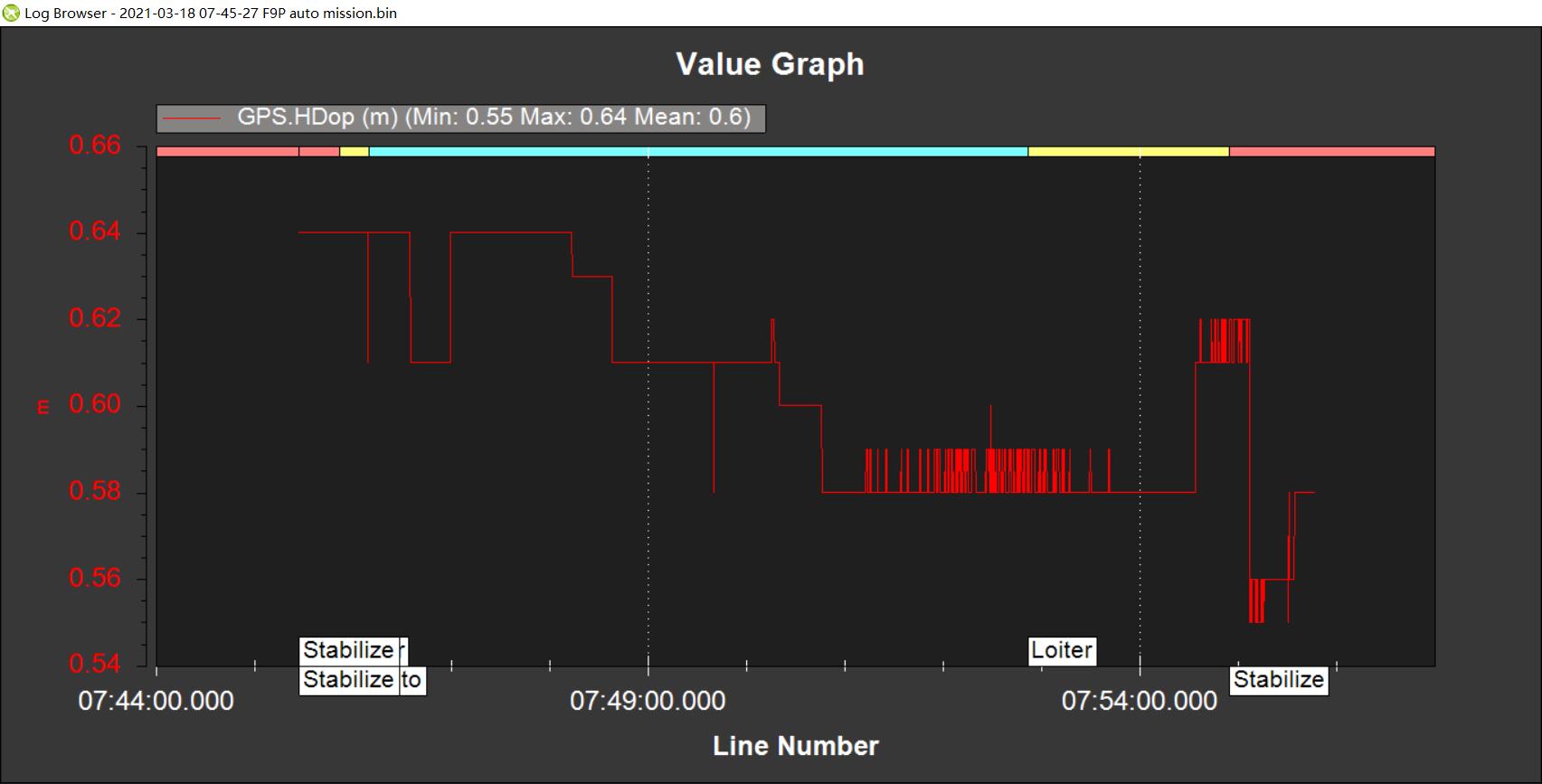
On the swashplate, the helicopter is definitely much smoother than before. I was able to fly Stabi Mode and AltHold Mode without shaking the rotor. only in Loiter Mode it didn’t stay still, but did the “toilet bowling”. So between the first test flight and the second test flight I changed the mounting location of the GPS unit again and recalibrated it. Nevertheless, the effect was not gone even on the second test flight.
I know that I should not use Loiter Mode until Stabi Mode is tuned. But I just tried it out. With the old design of the mechanics, Loiter Mode was not possible at all. Since the helicopter has shaken wildly.
After the rebuild, he started in Loiter Mode only the “toilet bowling”. That is already an improvement.
I will link the log files from both flights, as soon as my Windows Cloud allows it.
https://1drv.ms/u/s!AjSq727ChpJzZ1NIAVUPF21suE4?e=gEQWIg
https://1drv.ms/u/s!AjSq727ChpJzemM8xDA7deBiInE?e=eb9EfK
I would be happy if I could get some tips from you. Many thanks to all of you.
BR
Heri