Hi,
Today I took a flight on my Hexarotor with AC4.0.4 on CubeOrange, and with Here3.
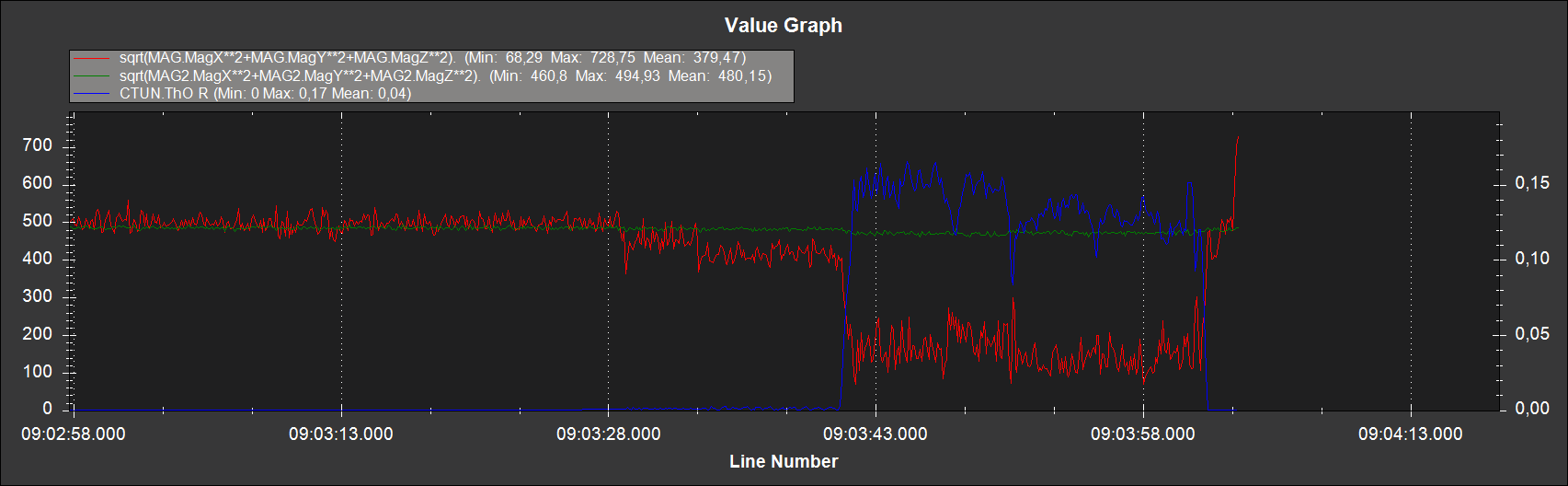
The drone took off, and the magnetic variance suddenly jumped to > 1.0 and the drone went uncontrollable. and switched to land mode, ultimately crashing.
The reason for the invariance is still not clear and the same setup without any modification has worked for so many times before.
Any help in finding the root cause of the issue, would be really great.
Please Find the log here - https://drive.google.com/file/d/1sRrPTOSODFTMoo2sukigEP30LZF68ZOd/view?usp=sharing
Thanks.
If you are troubled dealing with magnetic interference then try flying with EK2/3_MAG_CAL parameter set to 2
Hello! It seems that as soon as you raise the throttle, the magnetic field in the first compass changes a lot, so you would probably have interference from power cables close to the flight controller or the GPS. Check the wiring and move the cables away.
Hi David,
I am Using Kore Carrier Board and I don’t know What can I Do for that, there’s No Other Wire Close to The CubeOrange I was Using, and Apart from this, The same setup has took more than 10 to 12 Flights and not even a signle wire was changed. can it be issue with compass calibration ? Offsets seems to be just fine ? What could have this been ?
Your change in the magnetic field in the first compass is directly related with the throttle and the power of the motors, that is electrical and it is nothig to do with configuration.
To mitigate the problem you can select the second compass as primary because it is good and it is not being affected. Also you can do a CompassMot calibration (https://ardupilot.org/copter/docs/common-compass-setup-advanced.html). Those tips should solve your problem.
But if the second compass was already working, why didn’t ardupilot switched to it instead of just crashing down ? as I saw in the logs it did switched to Second Compass but then another ekf failsafe occured? If it was healthy why did the failsafe happened ? is this a bug ?
As in reply to a Discourse member, if anyone is still stuck try this -
Hi, What solved the problem for us was seriously one simple mistake we ignored the whole time, the compass was very close to the setup, isolating the external compass on a tall stand will surely fix the problem, also avoid the large vehicle mag calibration, it is also not perfect way to calibrate a compass, for now atleast.